
Features
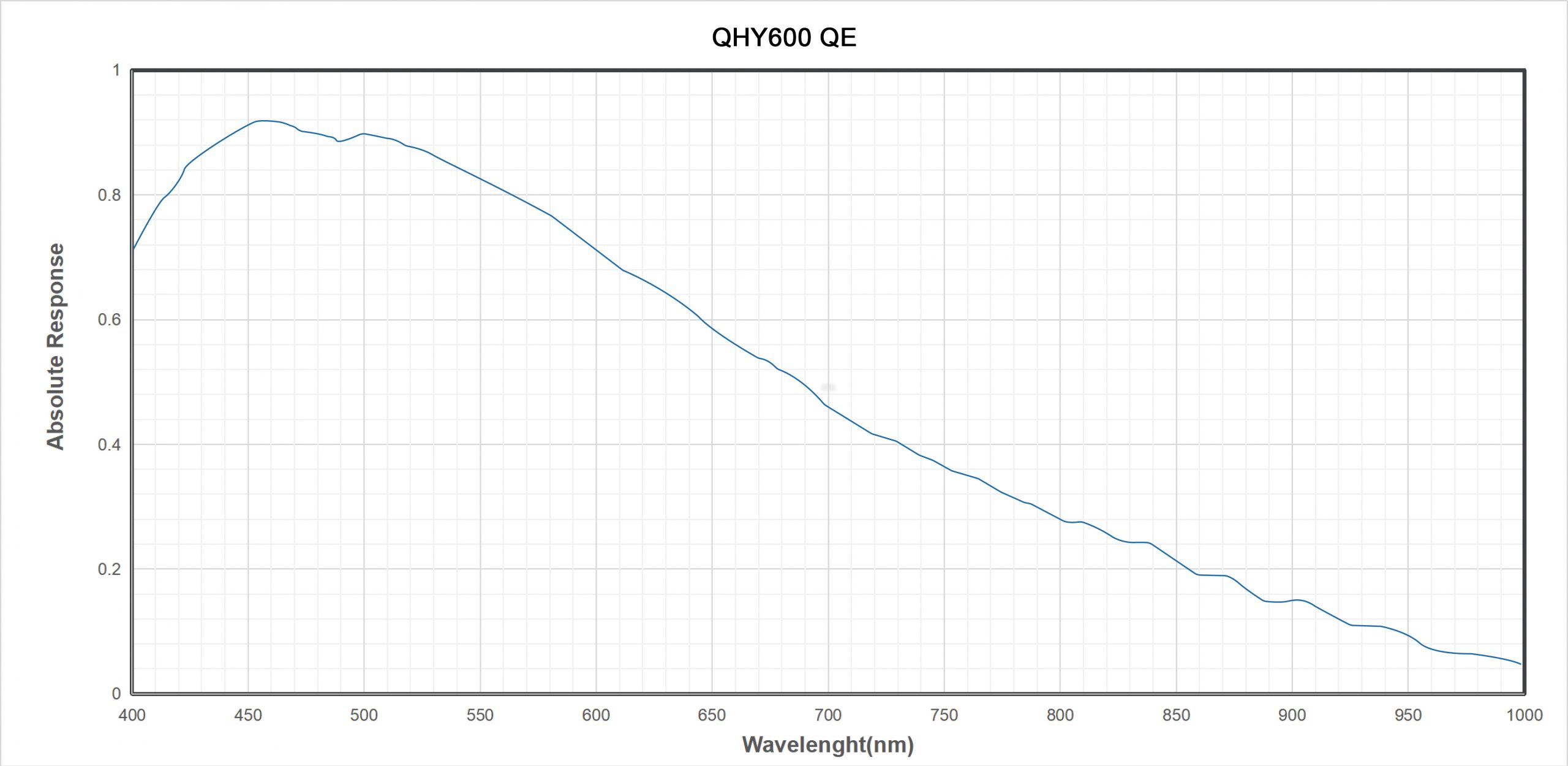
QHY600PRO has a back-illuminated structure technology, QE is up to 90%. It has a very low readout noise performance, it can get 1.1e- at the highest gain. It has a typical 51ke full-well in high gain readout mode and a typical 80ke readout in extending full-well mode. The camera supports the 2-cms readout mode (sample the same signal twice and averaged on the sensor) and it can get the readout noise 1.3times less than normal readout mode.
QHY600PRO has two data interfaces: USB3.0 interface and 2*10Gbps fiber interface. With 2*10Gbps fiber interface, it can get 4FPS @ 16bit full resolution and 10FPS @ 14bit full resolution frame rate under live streaming mode. The QHY600PRO also supports the Trig in/out function and GPS function.
QHY600PRO has an extremely good linear response in the whole full-well range. Please check the following document of the QHY600 Linear Test. It also has zero amplifier glow and zero RBI remains performance.
 Native 16 bit A/D: The new Sony sensor has native 16-bit A/D on-chip. The output is real 16-bits with 65536 levels. Compared to 12-bit and 14-bit A/D, a 16-bit A/D yields higher sample resolution and the system gain will be less than 1e-/ADU with no sample error noise and very low read noise.
Native 16 bit A/D: The new Sony sensor has native 16-bit A/D on-chip. The output is real 16-bits with 65536 levels. Compared to 12-bit and 14-bit A/D, a 16-bit A/D yields higher sample resolution and the system gain will be less than 1e-/ADU with no sample error noise and very low read noise.
 BSI: One benefit of the back-illuminated CMOS structure is improved full well capacity. In the back- illuminated sensor the light is allowed to enter the photosensitive surface from the reverse side. In this case the sensor’s embedded wiring structure is below the photosensitive layer. As a result, more incoming photons strike the photosensitive layer and more electrons are generated and captured in the pixel well. This ratio of photon to electron production is called quantum efficiency. The higher the quantum efficiency the more efficient the sensor is at converting photons to electrons and hence the more sensitive the sensor is to capturing an image of something dim.
BSI: One benefit of the back-illuminated CMOS structure is improved full well capacity. In the back- illuminated sensor the light is allowed to enter the photosensitive surface from the reverse side. In this case the sensor’s embedded wiring structure is below the photosensitive layer. As a result, more incoming photons strike the photosensitive layer and more electrons are generated and captured in the pixel well. This ratio of photon to electron production is called quantum efficiency. The higher the quantum efficiency the more efficient the sensor is at converting photons to electrons and hence the more sensitive the sensor is to capturing an image of something dim.
 TRUE RAW Data: In the DSLR implementation there is a RAW image output, but typically it is not completely RAW. Some evidence of noise reduction and hot pixel removal is still visible on close inspection. This can have a negative effect on the image for astronomy such as the “star eater” effect. However, QHY Cameras offer TRUE RAW IMAGE OUTPUT and produces an image comprised of the original signal only, thereby maintaining the maximum flexibility for post-acquisition astronomical image processing programs and other scientific imaging applications.
TRUE RAW Data: In the DSLR implementation there is a RAW image output, but typically it is not completely RAW. Some evidence of noise reduction and hot pixel removal is still visible on close inspection. This can have a negative effect on the image for astronomy such as the “star eater” effect. However, QHY Cameras offer TRUE RAW IMAGE OUTPUT and produces an image comprised of the original signal only, thereby maintaining the maximum flexibility for post-acquisition astronomical image processing programs and other scientific imaging applications.
 Zero Amplify Glow: This is also a zero amplifer glow camera.
Zero Amplify Glow: This is also a zero amplifer glow camera.
 Cooling & Anti-dew Control: In addition to dual stage TE cooling, QHYCCD implements proprietary technology in hardware to control the dark current noise. The optic window has built-in dew heater and the chamber is protected from internal humidity condensation. An electric heating board for the chamber window can prevent the formation of dew.
Cooling & Anti-dew Control: In addition to dual stage TE cooling, QHYCCD implements proprietary technology in hardware to control the dark current noise. The optic window has built-in dew heater and the chamber is protected from internal humidity condensation. An electric heating board for the chamber window can prevent the formation of dew.
 Sealing Technology: Based on almost 20-year cooled camera design experience, The QHY cooled camera has implemented the sealing control solutions. The sensor itself is kept dry with our silicon gel tube socket design for control of humidity within the sensor chamber. By the way, there’s no oil leaking.
Sealing Technology: Based on almost 20-year cooled camera design experience, The QHY cooled camera has implemented the sealing control solutions. The sensor itself is kept dry with our silicon gel tube socket design for control of humidity within the sensor chamber. By the way, there’s no oil leaking.
QHY600Series Naming Rules and Introduction
QHY600 Naming Rules
PH–Photographic Grade. Mainly for astrographers.
Pro–Scientific Grade. Mainly for scientific instituations. Since 2023, the Pro series have been devided to Pro I and Pro II series, the original “Pro” models will be replaced by “Pro I” models.
Pro I–Upgraded from the previous Pro series, it has 2*10G fiber interface with shorter body length.
Pro II–Based on Pro I models, it provides another two CameraLink interfaces.
M–Monochrome.
C–Colored.
L–Lite version is only available in PH Grade. Its body length becomes shorter and the built-in memory storage is 1GB instead of 2GB. Mono only.
SBFL–has a shorter back focal length.
LQ–supports liquid cooling.
Sensor Grade: All monochrome cameras (except the Lite version) are equipped with Industrial-Grade sensors, while the others are equipped with Consumer-Grade sensors.
| Grade | Body Length | Back Focal Length | Cooling Method | Buffer | 2*10g | CameraLink | Note | |
| QHY600PH L | Photographic | 123mm | 17.5+6mm(CAA) | Air Cooling | 1GB DDR3 | – | – | |
| QHY600PH | Photographic | 142mm | 17.5+6mm(CAA) | Air Cooling | 2GB DDR3 | – | – | |
| QHY600PH SBFL | Photographic | 138mm | 14.5mm | Air Cooling | 2GB DDR3 | – | – | |
| QHY600PH EB | Photographic | 185mm | 17.5+6mm(CAA) | Air Cooling | 2GB DDR3 | – | – | Discontinued |
| QHY600Pro | Scientific | 185mm | 17.5+6mm(CAA) | Air Cooling | 2GB DDR3 | Yes | – | Replaced by Pro I |
| QHY600Pro SBFL | Scientific | 181mm | 14.5mm | Air Cooling | 2GB DDR3 | Yes | – | Replaced by Pro I |
| QHY600Pro LQ | Scientific | 185mm | 17.5+6mm(CAA) | Liquid Cooling | 2GB DDR3 | Yes | – | Replaced by Pro I |
| QHY600Pro SBFL LQ | Scientific | 181mm | 14.5mm | Liquid Cooling | 2GB DDR3 | Yes | – | Replaced by Pro I |
| QHY600Pro I | Scientific | 142mm | 17.5+6mm(CAA) | Air Cooling | 2GB DDR3 | Yes | – | |
| QHY600Pro I LQ | Scientific | 142mm | 17.5+6mm(CAA) | Liquid Cooling | 2GB DDR3 | Yes | – | |
| QHY600Pro I SBFL | Scientific | 138mm | 14.5mm | Air Cooling | 2GB DDR3 | Yes | – | |
| QHY600Pro I SBFL LQ | Scientific | 138mm | 14.5mm | Liquid Cooling | 2GB DDR3 | Yes | – | |
| QHY600Pro II | Scientific | 142mm | 17.5+6mm(CAA) | Air Cooling | 2GB DDR3 | Yes | Yes | |
| QHY600Pro II LQ | Scientific | 142mm | 17.5+6mm(CAA) | Liquid Cooling | 2GB DDR3 | Yes | Yes | |
| QHY600Pro II SBFL | Scientific | 138mm | 14.5mm | Air Cooling | 2GB DDR3 | Yes | Yes | |
| QHY600Pro II SBFL LQ | Scientific | 138mm | 14.5mm | Liquid Cooling | 2GB DDR3 | Yes | Yes |
Introduction of "SBFL" Version
 SBFL (Short back-focal length version) models are specially designed for DSLR lens users or those who has special requirment of short back focal length. This version has a special front part version which has 14.5mm B.F.L only (The B.F.L consumed equals 12.5mm when connecting QHYCFW. About the defination of “BFL Comsumed” and our adapter system please view: https://www.qhyccd.com/astronomical-camera-adapter-bfl-solution/). A model with “SBFL” suffix can easily match Canon/Nikon lens even with filter wheel. On the side of this adapter there is a 4mm hole to connect air pump through plastic pipe in case of the dewing glass when necessary.
SBFL (Short back-focal length version) models are specially designed for DSLR lens users or those who has special requirment of short back focal length. This version has a special front part version which has 14.5mm B.F.L only (The B.F.L consumed equals 12.5mm when connecting QHYCFW. About the defination of “BFL Comsumed” and our adapter system please view: https://www.qhyccd.com/astronomical-camera-adapter-bfl-solution/). A model with “SBFL” suffix can easily match Canon/Nikon lens even with filter wheel. On the side of this adapter there is a 4mm hole to connect air pump through plastic pipe in case of the dewing glass when necessary.
Introduction of "LQ" Version

A model with “LQ” suffix supports Liqiud cooling. Since LQ models need customization, please contact the QHYCCD sales department. Compared to air cooling, liquid cooling offers the following advantages:
More efficient cooling. When using ambient temperature pure water for water cooling, the maximum cooling temperature is about 10 degrees Celsius lower than that of air cooling. QHYCCD is improving its support for ultra-low temperature liquid cooling.
No vibration. No matter how high-quality the fan is, it is inevitable to generate some image jitter. The water-cooling version does not have moving mechanical parts that cause camera vibration, thus avoiding negative effects on the image.
No turbulent hot air. For certain cameras that need to be installed in front of the optical system, such as Schmidt-Cassegrain telescopes, the hot air generated by air cooling systems may cause slight interference with the optical path. Water cooling does not produce this kind of impact.
Pro Series Interfaces Introduction
2*10Gigabit high-speed Fiber Optic interfaces
 The 2*10Gigabit Fiber Optic Interface (to be used with QHYCCD fiber optic capture card) meets the high-intensity data transmission requirements of professional fields such as professional observatories. It has the following advantages over the USB 3.0 interface:
The 2*10Gigabit Fiber Optic Interface (to be used with QHYCCD fiber optic capture card) meets the high-intensity data transmission requirements of professional fields such as professional observatories. It has the following advantages over the USB 3.0 interface:
Higher data rates
Using two 10G fiber optics, it can achieve a speed of 1.6GB/s (12.8Gbps), while the standard USB 3.0 has a theoretical maxium rate of 625MB/s (5Gbps), with an actual maximum transfer rate of 350MB/s.
Longer transmission distance
Fiber optic transmission can cover distances hundreds of times longer than USB 3.0. Standard USB 3.0 can only transmit up to 3 to 5 meters, and even with an active powered USB cable, it can reach up to 10 to 15 meters. In contrast, QHYCCD’s standard fiber optic module can achieve a transmission distance of up to 300 meters, and when paired with long-distance transmission optical modules, it can cover distances of several tens of kilometers.
Stable transmission without electromagnetic interference
USB 3.0 transmission can be susceptible to external electromagnetic interference, static electricity, leakage, and other factors, leading to data packet corruption, image loss, or camera control issues. Optical communication is not affected by electromagnetic interference.
6-pin GPIO interface
 This product supports a 6-pin GPIO interface, which can be defined for different modes. QHYCCD can customize it according to the user’s requirements, and users can also reprogram the FPGA to meet more complex needs.
This product supports a 6-pin GPIO interface, which can be defined for different modes. QHYCCD can customize it according to the user’s requirements, and users can also reprogram the FPGA to meet more complex needs.
Supports the professional Camera Link interface (exclusive to Pro II products)
 Supports the professional Camera Link interface (exclusive to Pro II products)
Supports the professional Camera Link interface (exclusive to Pro II products)
The Camera Link interface is a more suitable choice if your use case involves shorter transmission distances in industrial or laboratory areas. The Camera Link interface is specifically designed for high-speed and high-resolution cameras, offering fast data transmission speeds. It is well-suited for working under conditions where there is a large amount of image data and high bandwidth requirements.
Advanced Functions
Multiple Readout Modes
Multiple Readout Modes are special for QHY 16-bit Cameras (QHY600/268/461/411). Different readout modes have different driver timing, etc., and result in different performance. See details at “Multiple Readout Modes and Curves” Part.
Random change thermal noise suppression function
You may find some types of thermal noise can change with time in some back-illuminated CMOS cameras. This thermal noises has the characteristic of the fixed position of typical thermal noise, but the value is not related to the exposure time. Instead, each frame appears to have its own characteristics. The QHY600/268/461/411 use an innovative suppression technology that can significantly reduce the apparent level of such noise.
UVLO Protection
UVLO(Under Voltage Locking) is to protect the electronic device from damage caused by abnormally low voltages.
Our daily life experience tells us that the actual operational voltage of an electrical device must not significantly exceed the rated voltage, otherwise it will be damaged. For such precision equipment as cameras, long-term work at too low input voltage can also be detrimental to the working life of the camera, and may even make some devices, such as power manager, burn up due to long-term overload. In the all-in-one driver and SDK after 2021.10.23 stable version, the camera will give a warning when the input voltage of the camera is below 11V.
Optimizing USB Traffic to Minimize Horizontal Banding
It is common behavior for a CMOS sensor to contain some horizontal banding. Normally, random horizontal banding can be removed with multiple frame stacking so it does not affect the final image. However, periodic horizontal banding is not removed with stacking so it may appear in the final image. By adjust the USB traffic in Single Frame mode or Live Frame mode, you can adjust the frequency of the CMOS sensor driver and it can optimize the horizontal banding appeared on the image. This optimized is very effective to remove the periodic banding in some conditions.
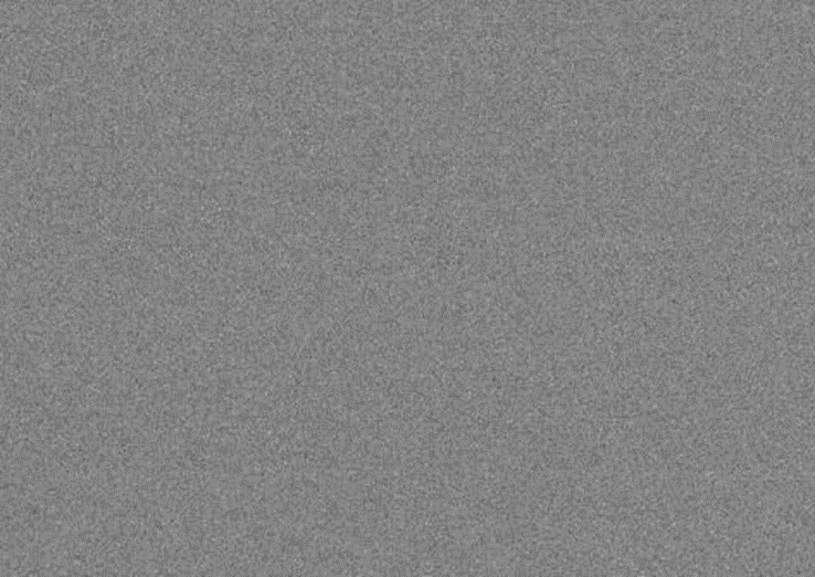
A typical Periodic Horizontal Noise under certain USB_TRAFFIC values.
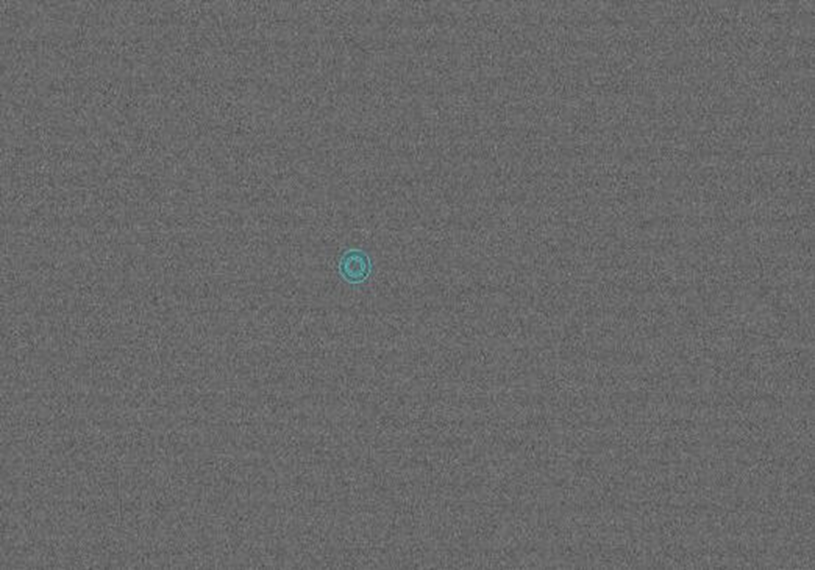
After Adjusting the USB Traffic to avoid the periodic horizontal noise.
Reboot the camera by power off and on
The camera is designed to use the +12V to reboot the camera without disconnecting and reconnecting the USB interface. This means that you can reboot the camera simply by shutting down the +12V and then powering it back on. This feature is very handy for remote controlling the camera in an observatory. You can use a remotely controlled power supply to reboot the camera. There is no need to consider how to reconnect the USB in the case of remote control.
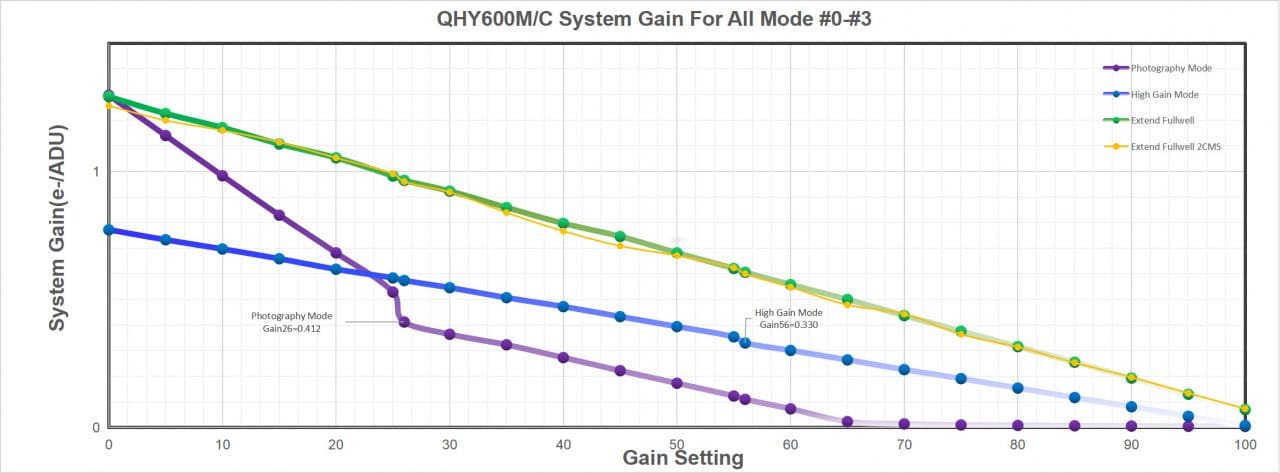
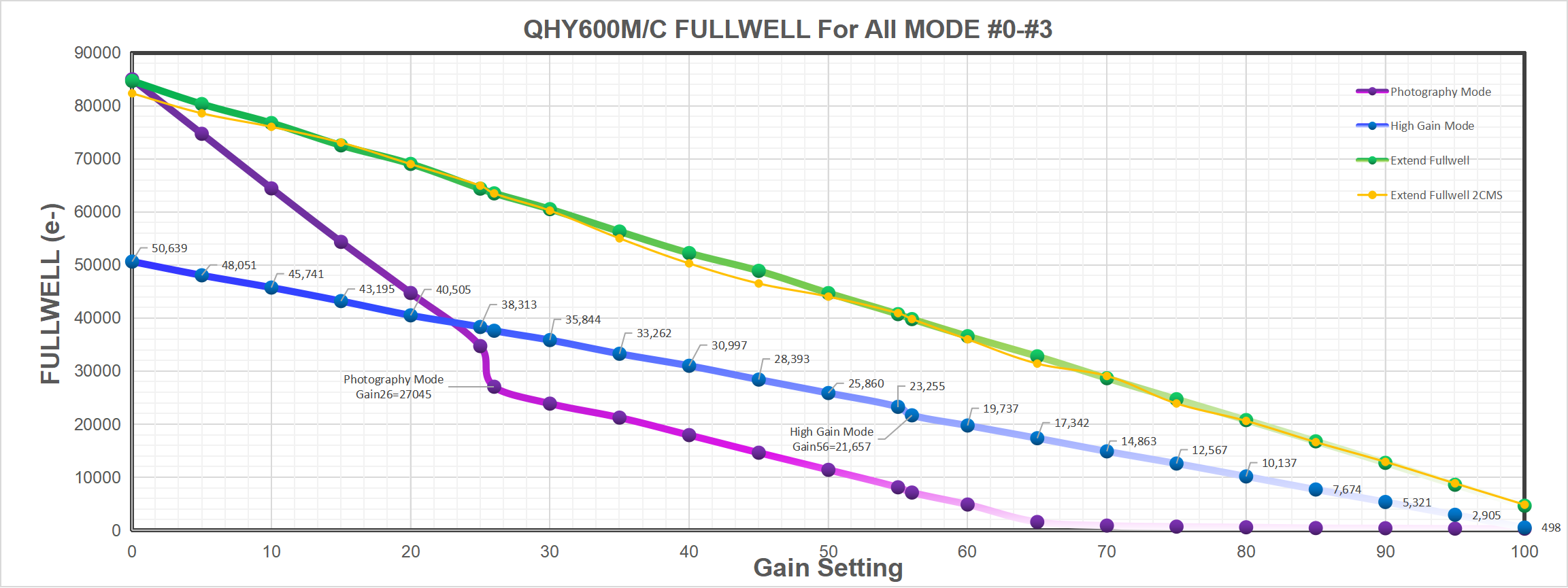
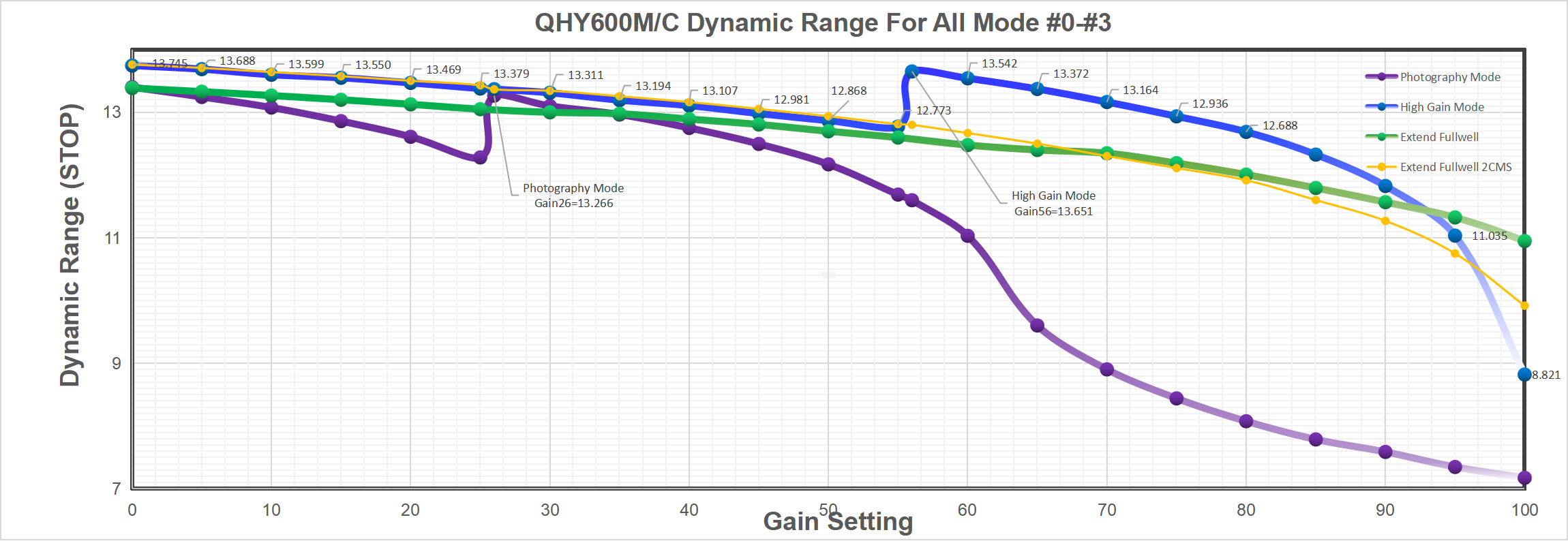
Multiple Readout Modes and Curves
Absolutely Response Curve. This curve is based on the Relative QE curve on the sony datasheet and QHYCCD measured two-wavelength to compare with a known QE sensor and get this. This curve is just for reference.
Multiple Readout Modes are special for QHY 16-bit Cameras (QHY600/268/461/411). Different readout modes result in different performance. These readout modes are currently supported in the ASCOM, SharpCap and N.I.N.A.
Photographic DSO Mode (Mode #0)
This mode is suitable for most DSO imaging situations. Since there is a drop in the noise between Gain 25 and Gain 26 (unity gain), we recommend it as default gain setting; however, gain0 is also good enough for a 16-bit sensor.
High Gain Mode (Mode #1)
This mode is something like double native iso of some new digital cameras, whose danamic range can greatly incerase at the vary high iso value, like iso800, iso3200, etc. The high gain mode provide such improvement for QHYCCD 16bit cameras. We recommend you choose this mode when you have to capture at high gain, for example, a vary dark object. Please note the switch point of HGC/LGC of QHY600/268/461 is 56. That means you must set Gain 56 to make the best of it.
Extended Fullwell Mode (Mode#2)
With a pixel size of 3.76um, these sensors already have an impressive full well capacity of 51ke. Nevertheless, QHYCCD has implemented a unique approach to achieve a full well capacity higher than 51ke- through innovative user controllable read mode settings. In Extended Fullwell Mode, the QHY600 can achieve an extremely large full-well charge value of nearly 80ke- and the QHY268 can achieve nearly 75ke-. Greater full-well capacity provides greater dynamic range and large variations in magnitude of brightness are less likely to saturate.
2CMS Modes
Extended Fullwell Mode-2CMS (Mode#3)
Photographic DSO Mode-2CMS (Mode#4)
High Gain Mode-2CMS (Mode#5)
Based on the three basic modes above, 2CMS mode can greatly reduce readout noise by secondary sampling while keeping the same full well value and system gain. We prefer 2CMS modes than basic modes in astrophotography. By the way, the recommend gain values are the same as their basic modes.
Specifications
| Model | QHY600Pro I
QHY600Pro II |
| Image Sensor | Sony IMX455 |
| Sensor Type | Both Available |
| FSI/BSI | BSI |
| Pixel Size | 3.76μm*3.76μm |
| Effective Pixels | 61.17 Megapixels |
| Effective Image Area | 36mm*24mm |
| Effective Pixel Area | 9576*6388 |
| Total Pixel Area | 9600*6422 (include optical black area and overscan area) |
| A/D | Native 16-bit (0-65535 greyscale) A/D |
| Full Well Capacity (1×1, 2×2, 3×3)
|
Photographic Mode
>51ke- / >204ke- / >408ke- Extended Full Well Mode >80ke- / >320ke- / >720ke- |
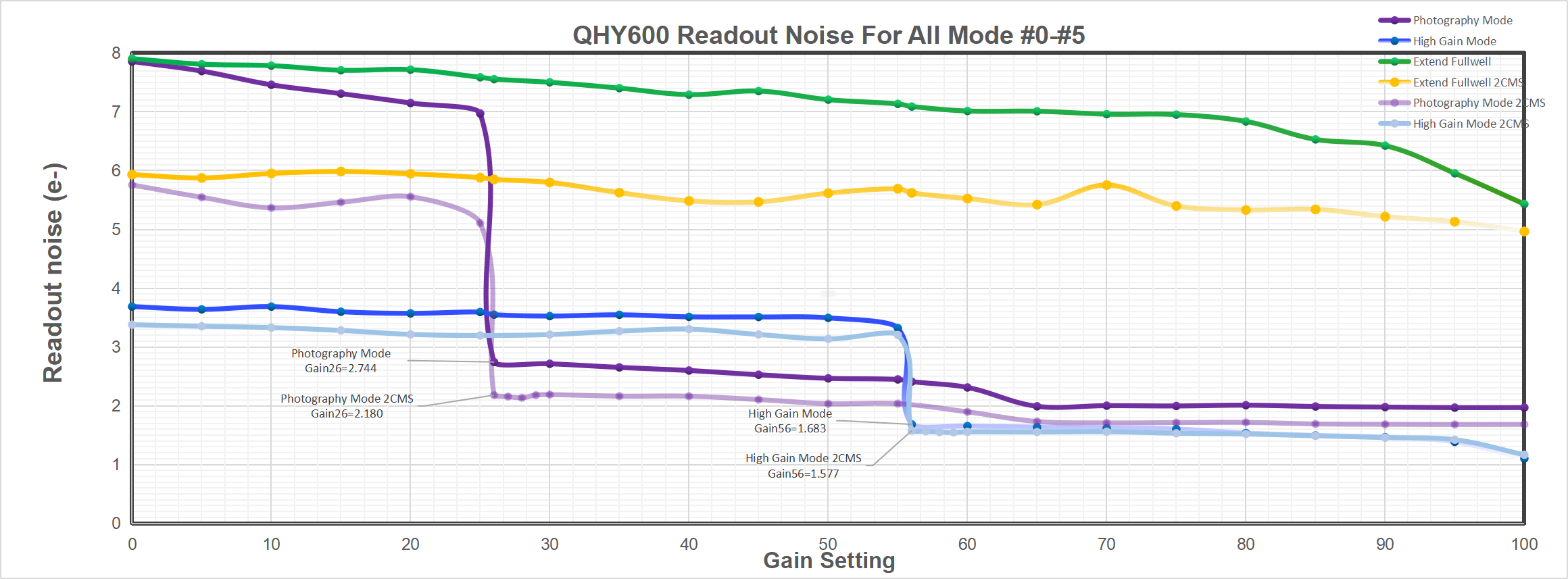
| Read Noise | Photography DSO Mode:1.9e- to 7.8e-(Gain0-100)
High Gain Mode:1.1e- to 3.6e-(Gain0-100) Extend Fullwell Mode:5.4e- to 7.9e-(Gain0-100) Extend Fullwell Mode-2CMS:4.9e- to 5.9e-(Gain0-100) |
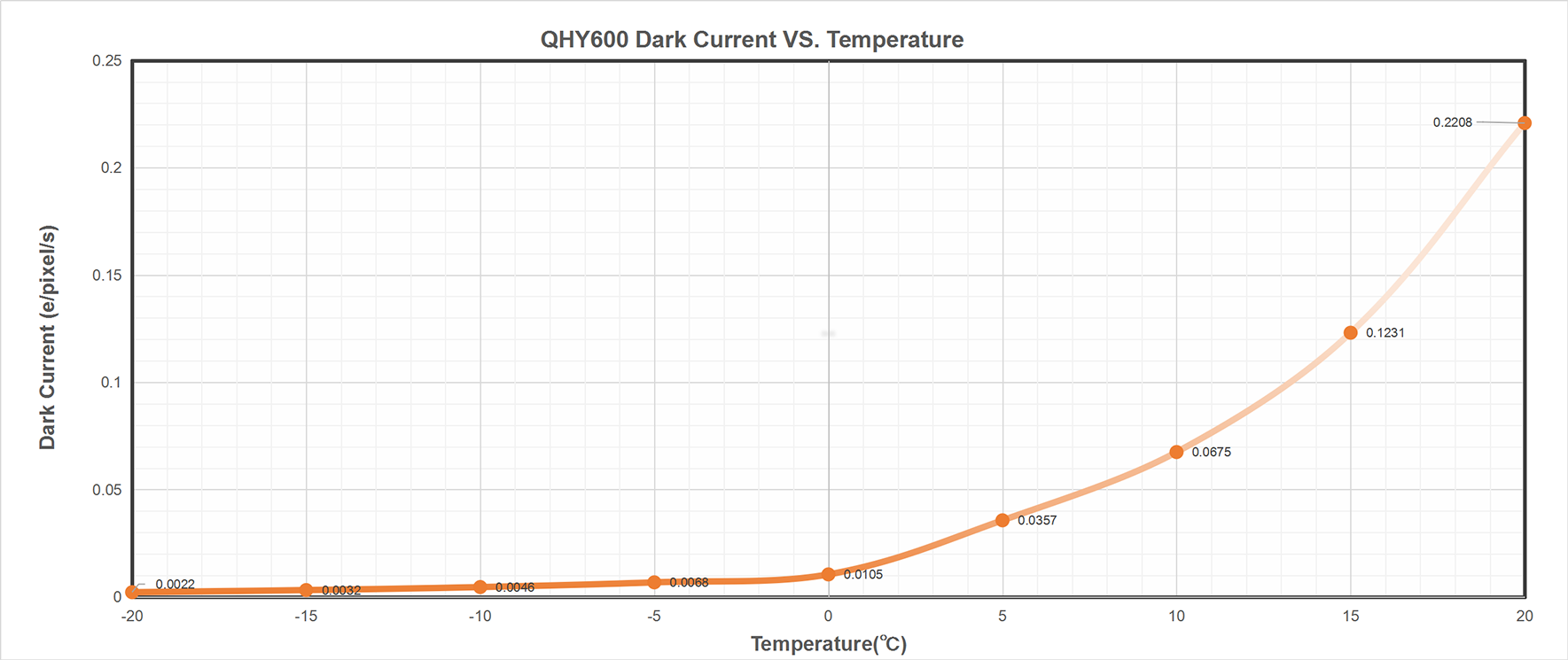
| Dark Current | 0.0022e-/pixel/sec @-20℃
0.0046e-/pixel/sec @-10℃ |
| Exposure Time Range | 40μs-3600sec |
| Shutter Type | Electronic Rolling Shutter |
| Computer Interface | USB3.0
2*10Gigabit Fiber 2*Camera Link (Pro II Version Only) |
| Filter Wheel Interface
|
4PIN QHYCCD CFW Port |
| Trigger Port | Programmable TrigOut, High Speed Sync Port / GPS interface Port |
| Full Frame Rates | USB3.0:
4.0FPS@8bit 2.5FPS@16bit
PCIE Mode: 4.0FPS@8bit 3.5FPS@16bit |
| ROI Frame Rates
|
USB3.0:
2048lines, 12.2FPS@8bit, 7.5FPS@16bit 1080lines, 22.5FPS@8bit, 14FPS@16bit 768lines, 31.5FPS@8bit, 19.5FPS@16bit 480lines, 47FPS@8bit, 30FPS@16bit
PCIE Mode: 2048lines, 12.2FPS@8bit, 11.9FPS@16bit 1080lines, 22.9FPS@8bit, 22.6FPS@16bit 768lines, 31.2FPS@8bit, 30.7FPS@16bit 480lines, 46.5FPS@8bit, 46.2FPS@16bit |
| Built-in Image Buffer | 2GB DDR3 Memory Buffer |
| Air Cooling System | Dual Stage TEC cooler:
– Long exposures (> 1 second) Typically -35℃ below ambient – Short exposure (< 1second) high FPS, Typically -30℃ below ambient(Test temperature +20℃) |
| Liquid Cooling | Available Only in LQ Version.
-45℃ below ambient with water cooling; more deltaT below ambient with cold liquid. |
| Recommended Flow Rates | 1.6ml/s |
| Anti-Dew Heater | Available |
| Humidity Sensor | Available |
| Firmware/FPGA remote Upgrade | Available via Camera USB port |
| Optic Window Type | AR+AR High Quality Multi-Layer Anti-Reflection Coating |
| Back Focal Length | Standard Version: 17.5mm+6mm (CAA)
SBFL Version: 14.5mm |
| Adapters | Support 2-inch, M54, M48, Nikon/Canon DSLR Lens, etc. (Combined with adapters ) |
| Weight | About 1kg |
| Power | 40W/100%
20W/50% 13.8W/0% |
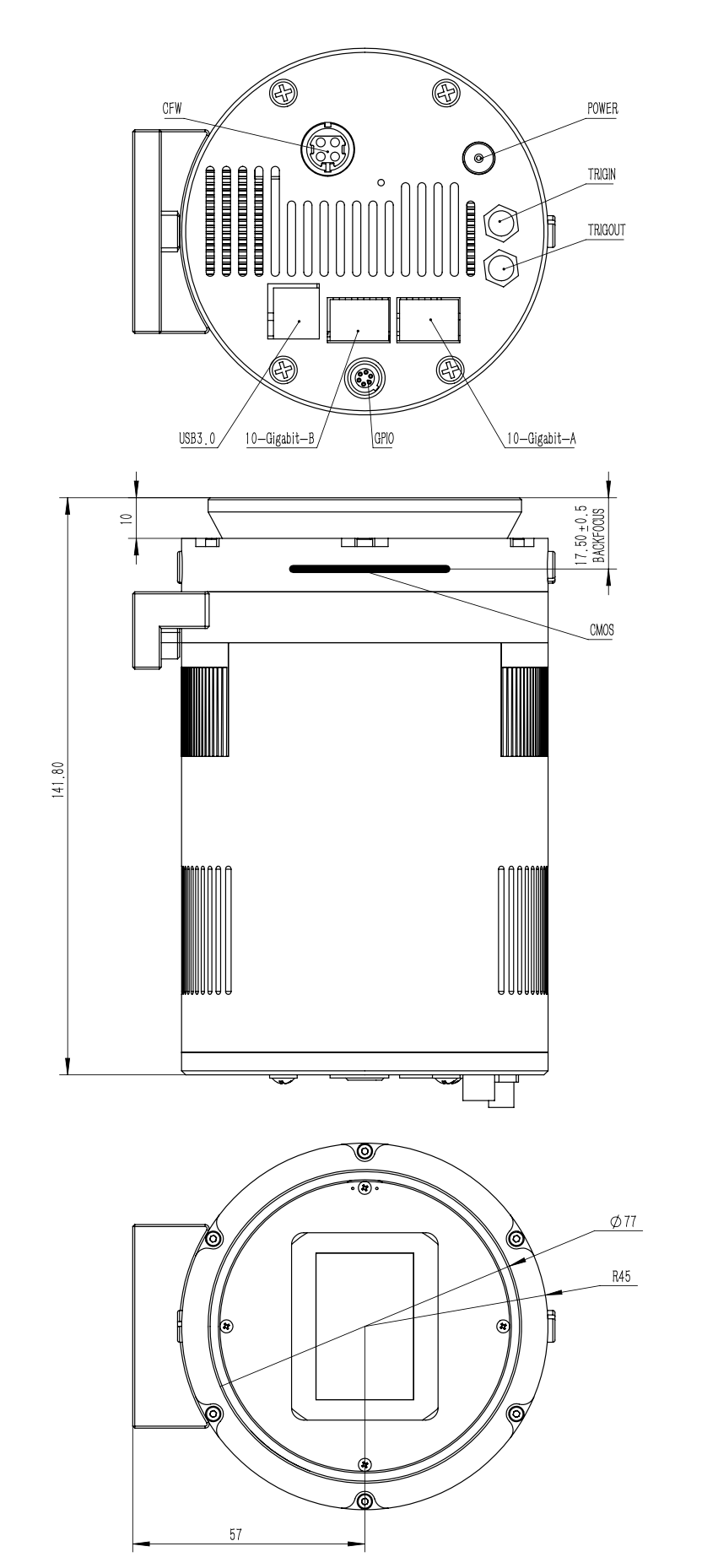
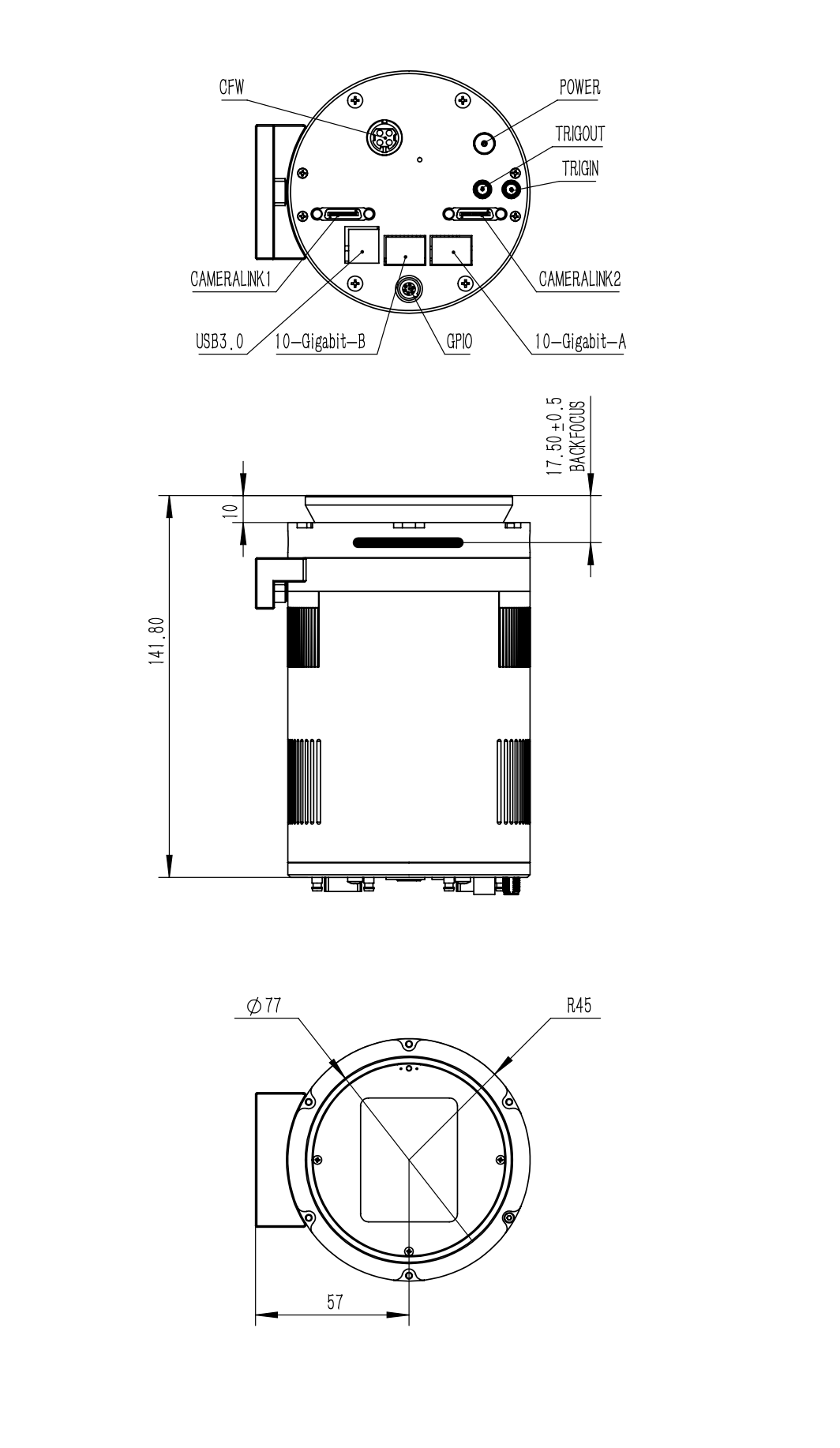
Mechanical Dimensions
QHY600 PRO I
QHY600Pro II
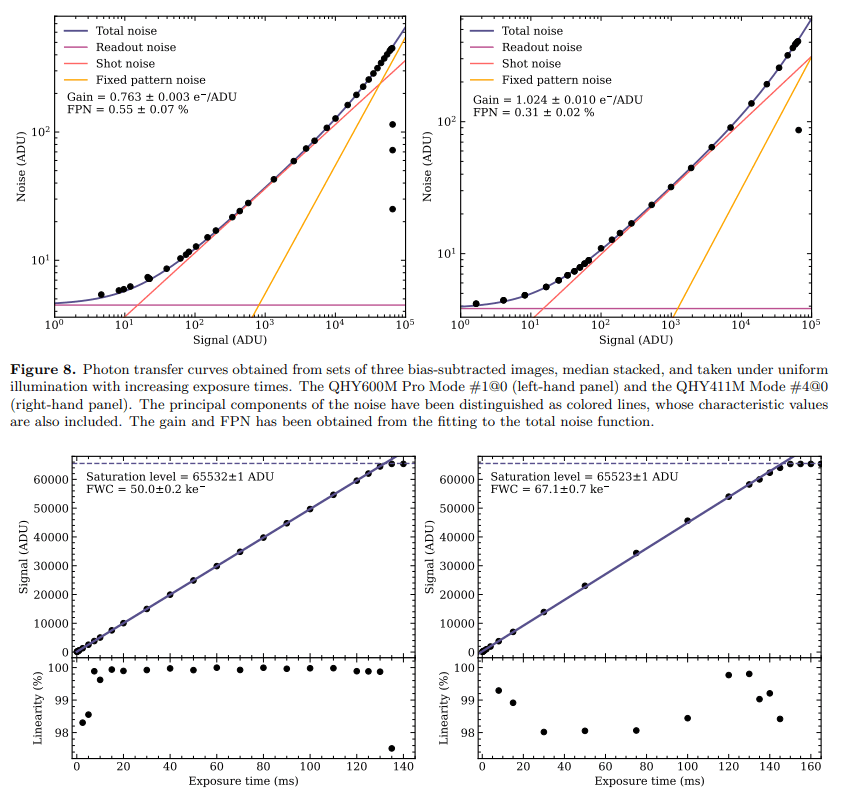
Reference Paper/Document
A new paper named Scientific CMOS Sensors in Astronomy: QHY600 and QHY411 has been published! It was finished by researchers from the Institute of Astrophysics of Canarias (IAC), Spain.
https://arxiv.org/abs/2302.03700
A Large Array Survey Telescope composed of 48, 28-cm f/2.2 telescopes (32 already installed) equipped with 48 full-frame backside-illuminated cooled CMOS camera QHY600 Pro:
https://arxiv.org/abs/2304.04796

Brief User Guide
Install “All-In-One” Driver&SDK Pack
Before Start: Input Voltage Requirements
The camera requires an input voltage between 11V and 13.8V. If the input voltage is too low the camera will stop functioning or it may reboot when the TEC power percent is high, causing a drain on the power. Therefore, please make sure the input voltage arrived to the camera is adequate. 12V is the best but please note that a 12V cable that is very long or a cable with small conductor wire may exhibit enough resistance to cause a voltage drop between the power supply and the camera. The formular is: V(drop) = I * R (cable). It is advised that a very long 12V power cable not be used. It is better to place the 12V AC adapter closer to the camera.
First connect the 12V power supply, then connect the camera to your computer via the USB3.0 cable. Make sure the camera is plugged in before connecting the camera to the computer, otherwise the camera will not be recognized. When you connect the camera for the first time, the system discovers the new device and looks for drivers for it. You can skip the online search step by clicking “Skip obtaining the driver software from Windows Update” and the computer will automatically find the driver locally and install it. If we take the 5IIISeries driver as an example (shown below), after the driver software is successfully installed, you will see QHY5IIISeries_IO in the device manager.
Please note that the input voltage cannot be lower than 11.5v, otherwise the device will be unable to work normally.
Install "All-In-One" System Pack
All-in-one Pack supports most QHYCCD models only except PoleMaster and several discontinued CCD cameras.
Download Page: https://www.qhyccd.com/download/
Video Tutorial: https://www.youtube.com/embed/mZDxIK0GZRc?start=1
- Since most of the contents of All-in-one package are plug-ins that support third-party software, the third-party capturing software that you want to use must be installed before the All-in-one package. Otherwise the program will report an error.
- ALL-IN-ONE Pack contains:
- System Driver, which is necessary for the camera operation and must be installed.
- WDM Broadcast Driver, which can provide a live signal to Obs and other live software, you can install it if you have such needs like opeing a live show.
- EZCAP_QT , which is developed by QHYCCD and can be used in QHY devices tests, and management of updates. So even if you won’t use EZCAP_QT for capturing, we suggest you install it.
- Ascom driver, which is necessary for the camera used in Ascom (the latest version of Ascom is 6.6).
- The two sorts of Ascom CFW Drivers correspond to two methods of controling the filter wheel: USB control and camera serial control. It is recommended that both drivers should be installed if you have a filter wheel.
- CP210X_VCP is a serial driver. Some computers come with the driver, but the computer without the driver may be failed of controling the filter wheel.
- SDKs for Third-party Software: Just pick and install the corresponding SDK according to the software you want to use. Don’t forget to check whether the software you are using is 32-bit or 64-bit and select the right SDKs.
- SHARPCAP is also included in the pack, you can choose 32-bit or 64-bit to install. This is authorized by SHARPCAP.
- QT LIB is a plug-in to ensure that 64-bit software can exeuate normally on some computers with poor compatibility.
- Difference between Stable version and Beta Version: Beta version is the latest version, which gives priority to support for the latest products (the stable version may not be compatible with those yet), and has some of the latest optimized ,but experimental features. The stable version is older than the beta version but more stable, so it is recommended for beginners who are not using the latest products.
- Don’t let the camera connect to the computer during the All-in-one pack installation process; connect it to the computer after all the installation is complete.
Connect DSO Imaging Software (e.g. NINA)
Before using software, make sure you have connected the cooling camera to the 12V power supply and connected it to the computer with a USB3.0 data cable. If it’s an uncooled camera, 12V power is not needed. We recommend 64-bit Software, like SharpCAP x64 , N.I.N.A x64. etc., especially when you’re using 16bit cameras.
In NINA, you can select the device to connect to QHY Camera directly without ASCOM driver.
If connecting to the camera via ASCOM is desired, first make sure you have installed both the QHYCCD ASCOM Drivers and ASCOM Platform. Then you would select the appropriate camera driver under the ASCOM section. Then click the Connect icon. Here we take NINA as an example, but it’s similar to other software packages supporting ASCOM, like MaxDL, The SkyX, etc.
Connect Planetary Imaging Software (e.g. SharpCap)
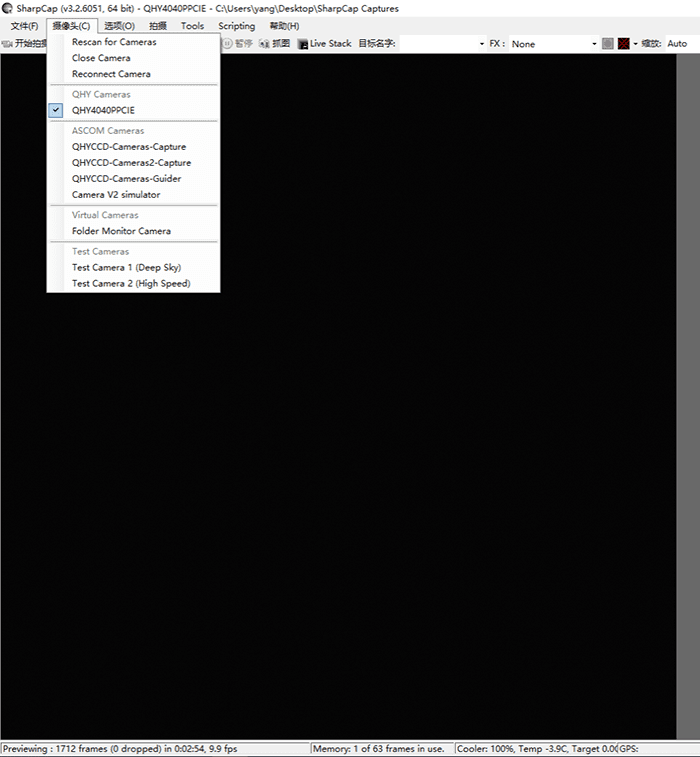
Launch SharpCap. If the software and drivers mentioned above are installed successfully, the video image will appear automatically about 3 seconds after the software loads. You will also see the frame rate in the lower left corner of the software window as shown below.
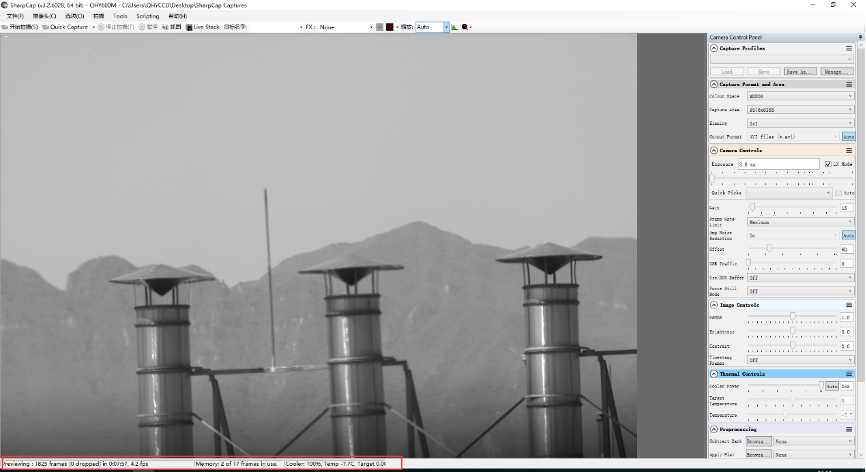
If you have already started the SharpCap software before connecting the camera, in order to open the camera, click on the “camera” in the menu bar and then select the device.
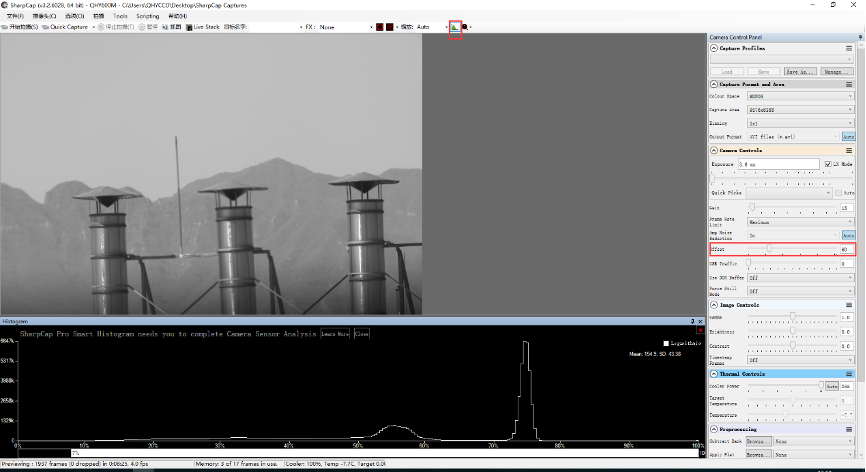
Offset adjustment. When you completely block the camera (i.e., like taking a dark frame) you may find that the image is not really zero. Sometimes this will reduce the quality of the image contrast. You can get a better dark field by adjusting the offset. You can confirm this by opening the histogram as indicated in the figure below.
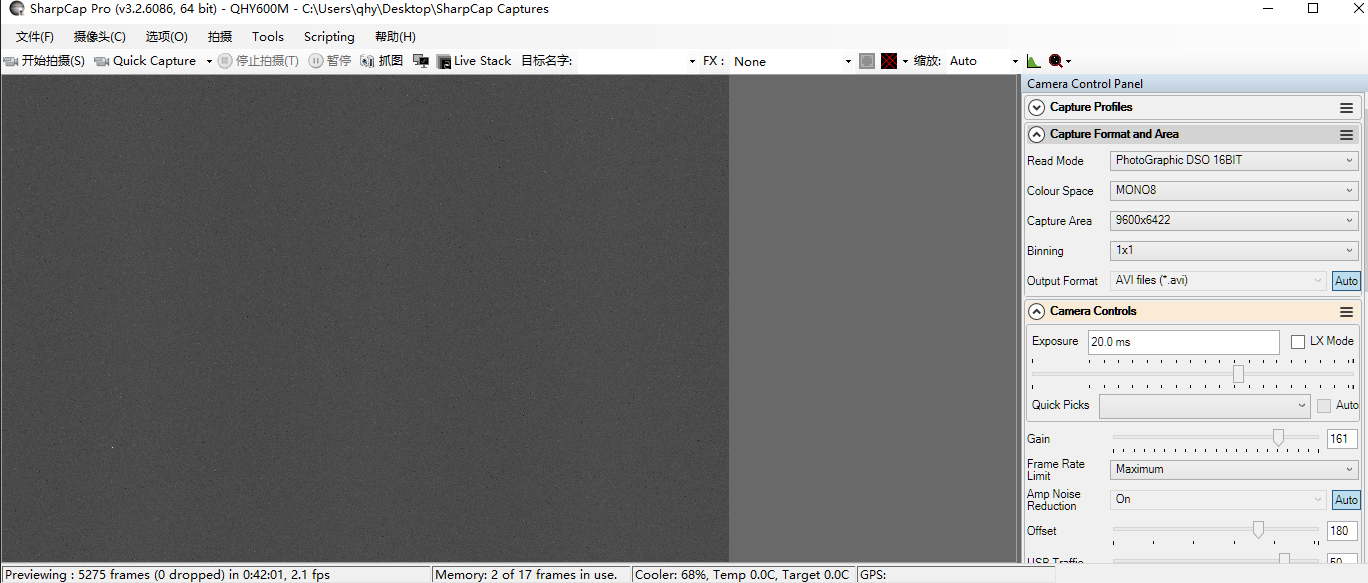
If you want to enter the 16-bit image mode, select the “RAW16” mode.
By selecting the “LX” mode you can expand the exposure setting range and take long exposures.
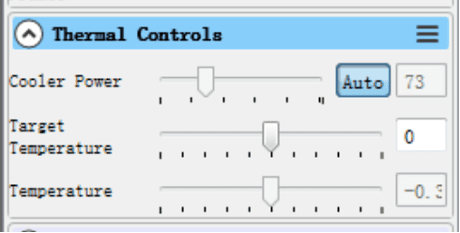
After cooling devices connected to the 12V power supply, the temperature control circuit will be activated. You can control the CMOS temperature by adjusting the settings in the figure below. Basically, you can control the temperature of CMOS by either adjusting “Cooler Power” or clicking “Auto” and setting “Target Temperature”. You can also see the CMOS temperature at the lower-left corner of the software window.
Advanced Control Tools
Click to download (2021.1.2)
Run Sharpcap and make sure the QHY Camera works well under it. You will see the continous image appears.
Click “connect” button and it will show camera name and series number.
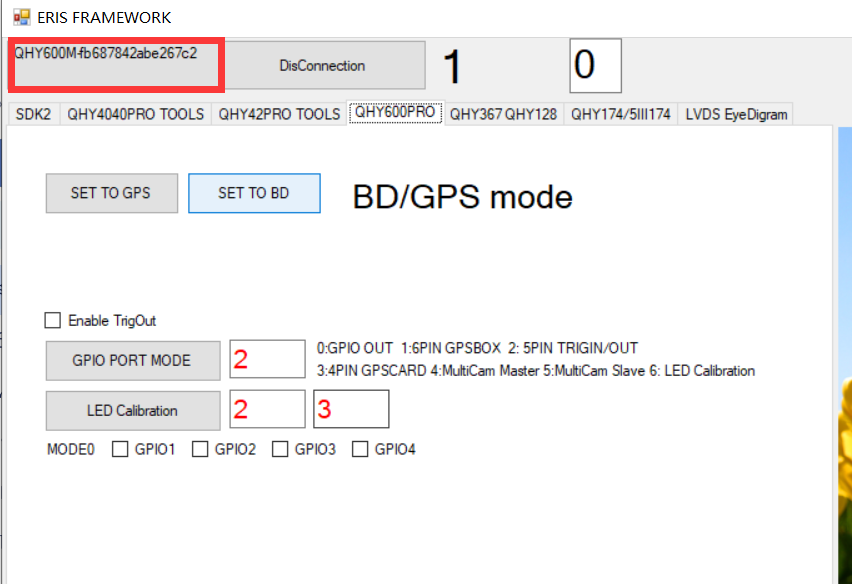
select QHY Camera tabl.
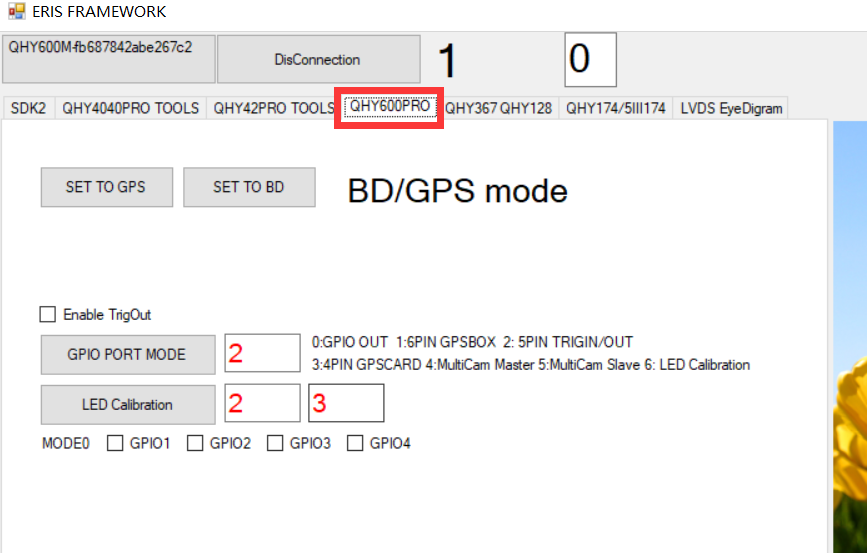
check on the “Enable TrigOut” Input 2 to the textbox near to the “GPIO PORT MODE”. Then click the “GPIO PORT MODE” Button to set the GPIO working mode.
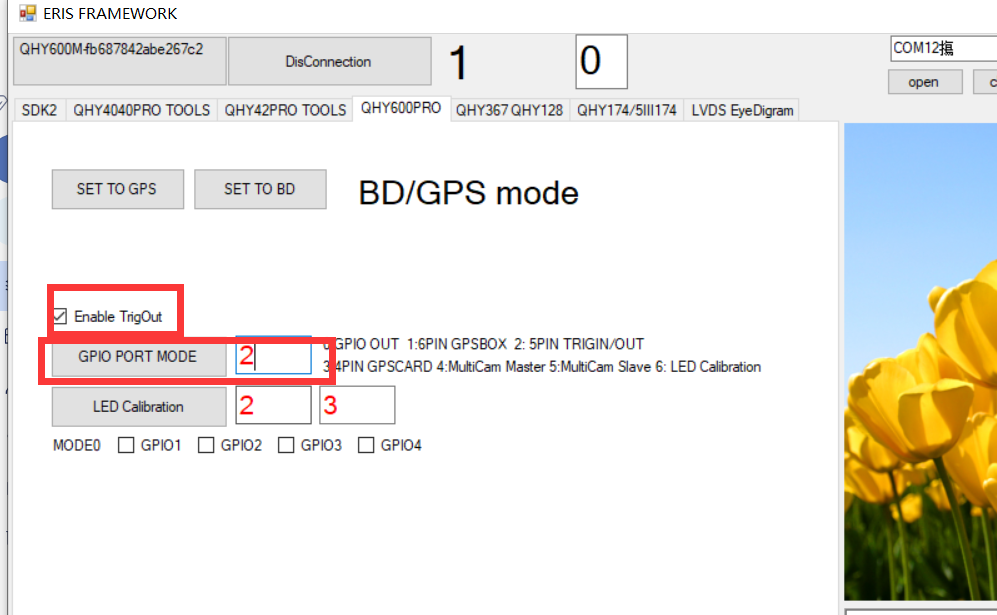
Check the waveform output from the TrigPort.
The introduction of different GPIO PORT MODE
MODE0: Generic GPIO output mode / Auto Guide Port
In this mode. Four GPIO port is all output . You can control each port to output high or output low with the API. This mode does not controlled by Enable TrigOut.
You can select the check box of MODE0, GPIO1,GPIO2,GPIO3,GPIO4 to test this mode. This mode is also been used to test if the socket io port working well.
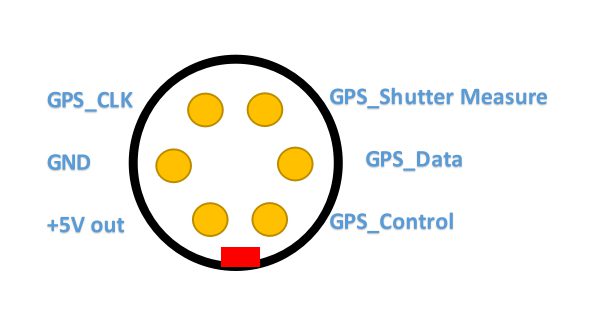
MODE1: 6PIN QHY-GPSBOX mode
In this mode, Four GPIO port is configed as gps_clock, gps_data, shuttermeassure,gps_control. You can connect with QHYCCD-GPSBOX. The camera will output the shuttermeassure signal to GPSBOX and GPSBOX will send the data to camera. Camera will replace the first some pixel to the gps data .
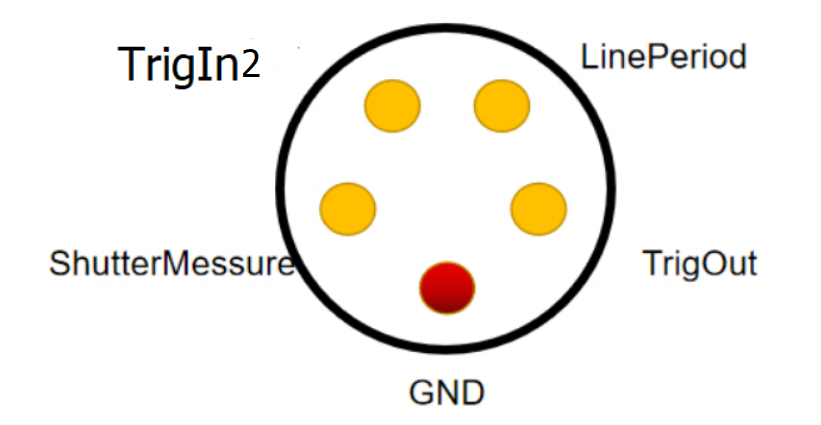
MODE2: 5PIN Generic TrigOut / TrigIn mode
In this mode, Four GPIO port is configed as TrigOut, ShutterMeassure, TrigIn, LinePeriod . Only TrigIn pin is input direction and other three pin is output direction.
In some camera, like QHY4040,QHY2020,QHY42PRO,QHY6060, The shuttermeassure waveform rising edge is the start exposure time and falling edge is the end exposure time 。 in other camera like QHY600,QHY268, QHY411,QHY461 etc, The shuttermeassure waveform is the vsync signal . It is near to the end of exposure time of the first row. For more information of TrigOut,LinePeriod. Please see some other document of QHYCCD supplied.
MODE3: 4PIN GPS Card TrigIn mode
In this mode. there is two pin is configured as ouptut . Both of the two pins is the shuttermeassure signal but one of it is inverted. This is suitbale for some GPS card which need such a “differencial signal”. But please note this is not LVDS signal. It is still TTL signa,
MODE4: Multi-Camera Master Mode
TO BE ADDED
MODE5: Multi-Camera Slave Mode
TO BE ADDED
MODE6: LED Calibration Mode
By using the controlled LED pulse, we can calibrate the distance from the TrigOut or ShutterMeassure signal to the real pixel/row start/end exposure time. To use this mode. You need to connect a LED to one GPIO pin and let the camera capture the flash that output from the camera. The start time and end time relative with the TrigOut/ShutterMeassure can be set by APIs. By check if the camera captured this pulse. You will get the delta time of the TrigOut/ShutterMeassure signal and use it to calibrate the messured GPS time.
| mode 0 | mode 1 | mode 2 | mode 3 | mode 4 | mode5 | mode6 |
| GPIO1 | GPSBOX_Control | ShutterMessure+ | ShutterMessure+ | n.a | n.a | ShutterMessure+ |
| GPIO2 | GPSBOX_Data (IN) | TrigIn2 | ShutterMessure- | n.a | n.a | TrigIn2 |
| GPIO3 | GPSBOX_ShutterMessure | LinePeriod | n.a | HSYNC(OUT) | HSYNC(IN) | LinePeriod |
| GPIO4 | GPSBOX_CLK | TrigOut | n.a | VSYNC(OUT) | VSYNC(IN) | LED(OUTPUT) |
| GND | GND | GND | GND | GND | GND | GND |
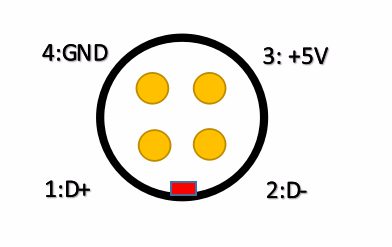
GPXBOX-QHY600Pro High Precise Time Measurement
QHY600 Professional version has 5pin/6pin GPIO socket. Which can output the Vsync , Hsync signal for meassurement. It can connect with the QHY-GPSBOX to do directly time test and encode the meassured information into the image.
This document will introcude how to get the precise time meassurement of it.
Due to the rolling shutter of the QHY600 cmos sensor. The camera can not output a signal to indicate the global exposure starting and global expsoure ending. The signal for meassurement is Vsync. Vsync is apporx the time that one frame starting to readout. So it is very close to the exposure end time of row 0. The pulse width of Vsync is about 0.4us.
Rolling Shutter Timing
For rolling shutter. It is row based exposure. Normally speaking the end of the exposure is happend at the time when one row begin to readout. And the start of the exposure is controlled by register and the unit is row period.
exposure time = n * row period
If we get to know the end of exposure time of row 0. We get to know the start exposure time is
exposure start time row 0 = exposure end time row 0 – exposure time 0
And we can get to know other rows start exposure and end exposure :
exposure start time row 1 = exposure start time row 0 + row period
exposure start time row 2 = exposure start time row 0 + 2 * row period
……
exposure end time row 1 = exposure end time row 0 + row period
exposure end time row 2 = exposure end time row 0 + 2 * row period
……
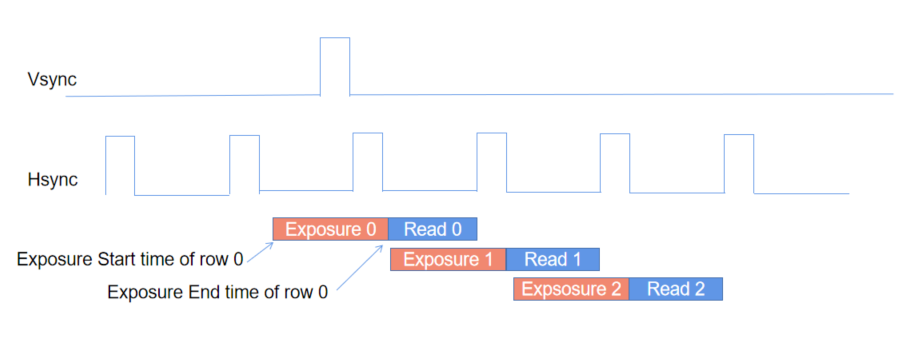
fig.1 The timing graph when exposure time is one row period (short exposure mode)
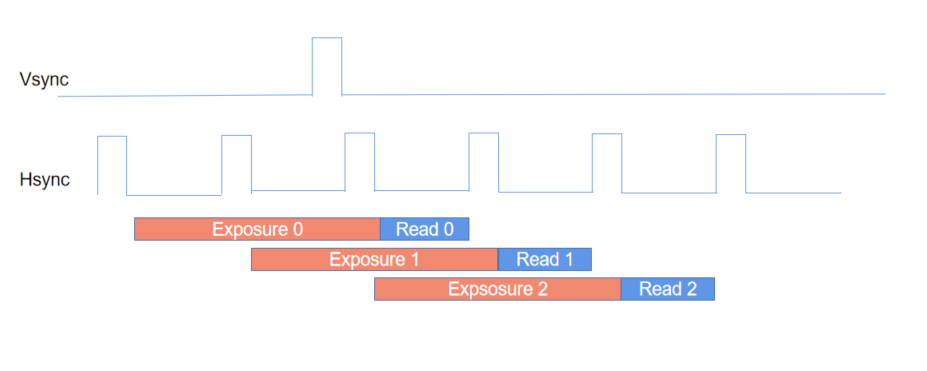
fig.2 The timing graph when exposure time is two row period (short exposure mode)
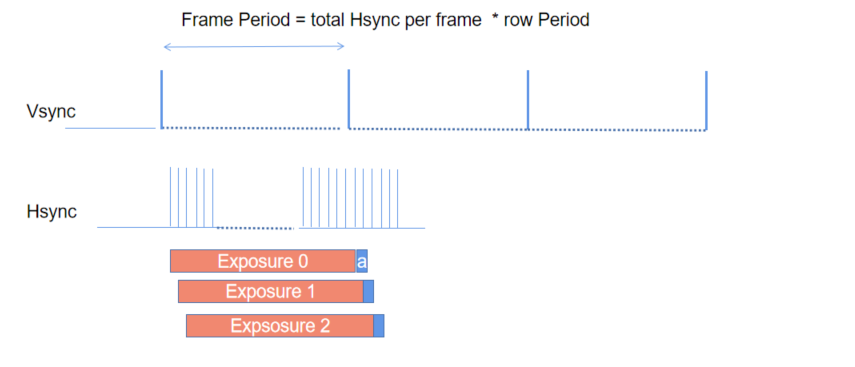
fig.3 The timing graph in long exposure mode. long exposure is done by increase the hsync number between two vsync. So the exposure time = frame period .
For precise time meassurement. Once we get the time of end of exposure time of row 0. We can get all other row’s end exposure time and start exposure time.
If the object is a point source. We can get to know its position (X,Y) in the image. Then we can use the exposure start and end time of this row for the object’s exposure start/end time.
Get to know the Vsync time to the first row end time
Because the cmos sensor does not output certain row’s end exposure time , like the row 0’s end exposure time. And also , since we need to use the (X,Y)position to calculate the object. We need to know the relationship that the row on the image to the exposure time . For example, the row 0 on image may not the row 0 in the fig.1,2,3. Because the sensor has the optic black rows.
In order to meassure the vsync signal to the end of exposure time of row 0 in the image. We need to use the LED calibration method to do it.
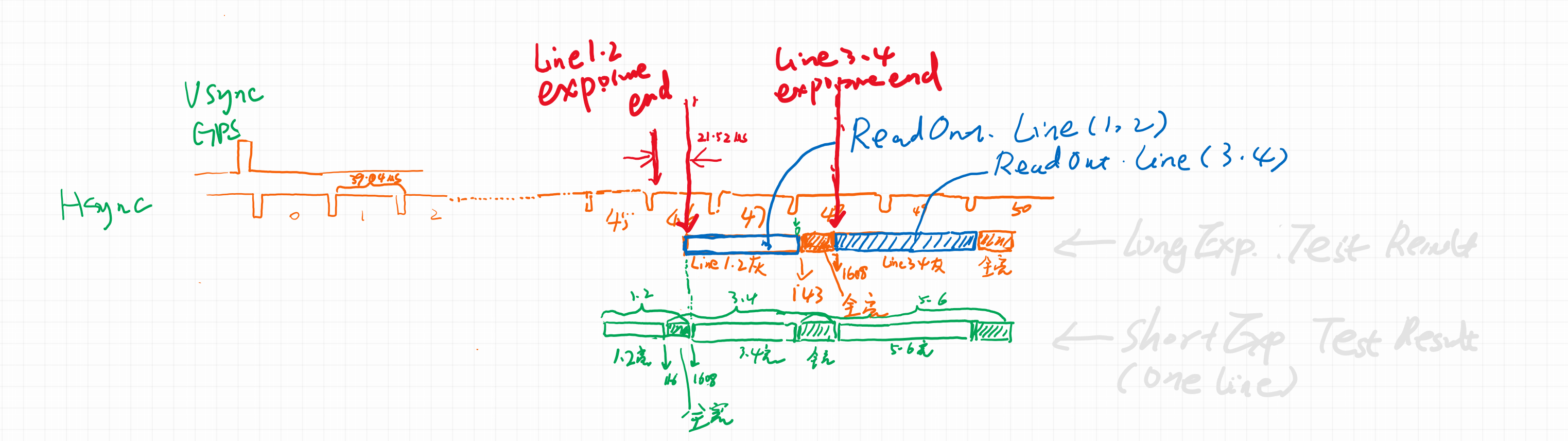
We use the LED method to test the timing and found the the camera is exposured with two rows together. And for default resolution when capture with SharpCAP, USB_TRAFFIC=0. Line1 and Line2 ends of exposure in the HSYNC=46. And the position to the falling edge of hync is 21.52us. So we can get to know:
T (end exposure, line1&2) = GPS position + 46 * LinePeriod + 21.52us.
When in ROI mode, it is best to redo the LED calibration to get accurate value. QHYCCD can supply the LED calibration tools for calibrate it.
Important: For 2CMS mode , The exposure is with one rows, not two rows togehter. And the “46” and the “21.52us” will not the same.
FAQ
(1)What parameter will effect the LinePeriod and how to get to know the LinePeriod.
USB_TRAFFIC, 8bit/16bit setting will change it. You can use osciliscope to meassure the HSYNC signal to get to know the LinePeriod. In QHYCCD SDK there is a API also can return it. But it is best to use the osciliscope to double check it.
uint32_t STDCALL GetQHYCCDPreciseExposureInfo(qhyccd_handle *h,uint32_t *PixelPeriod_ps,uint32_t *LinePeriod_ns,uint32_t *FramePeriod_us,uint32_t *ClocksPerLine, uint32_t *LinesPerFrame,uint32_t *ActualExposureTime,uint8_t *isLongExposureMode
(2)What parameter will effect the “46” in above text?
The ROI , LiveFrame/SingleFrame, the 2CMS/non 2CMS will effect it. It is best to use LED calibrate method to test it to confirm the detail timing.
Maintenance
Drying the camera CMOS chamber
- There are holes in the two sides of the camera near the front plate that is normally plugged by a screw with an o-ring. If there’s moisture in the CMOS chamber that causes fog, you can connect the desiccant tube to this hole for drying. There would better be some cotton inside to prevent the desiccants from entering the CMOS chamber.
 Please note that you may need to prepare desiccants yourself, because for most countries and regions desiccants are prohibited by air transport. Since QHY always deliver your goods by air, sorry that we can’t provide desiccants for you directly.
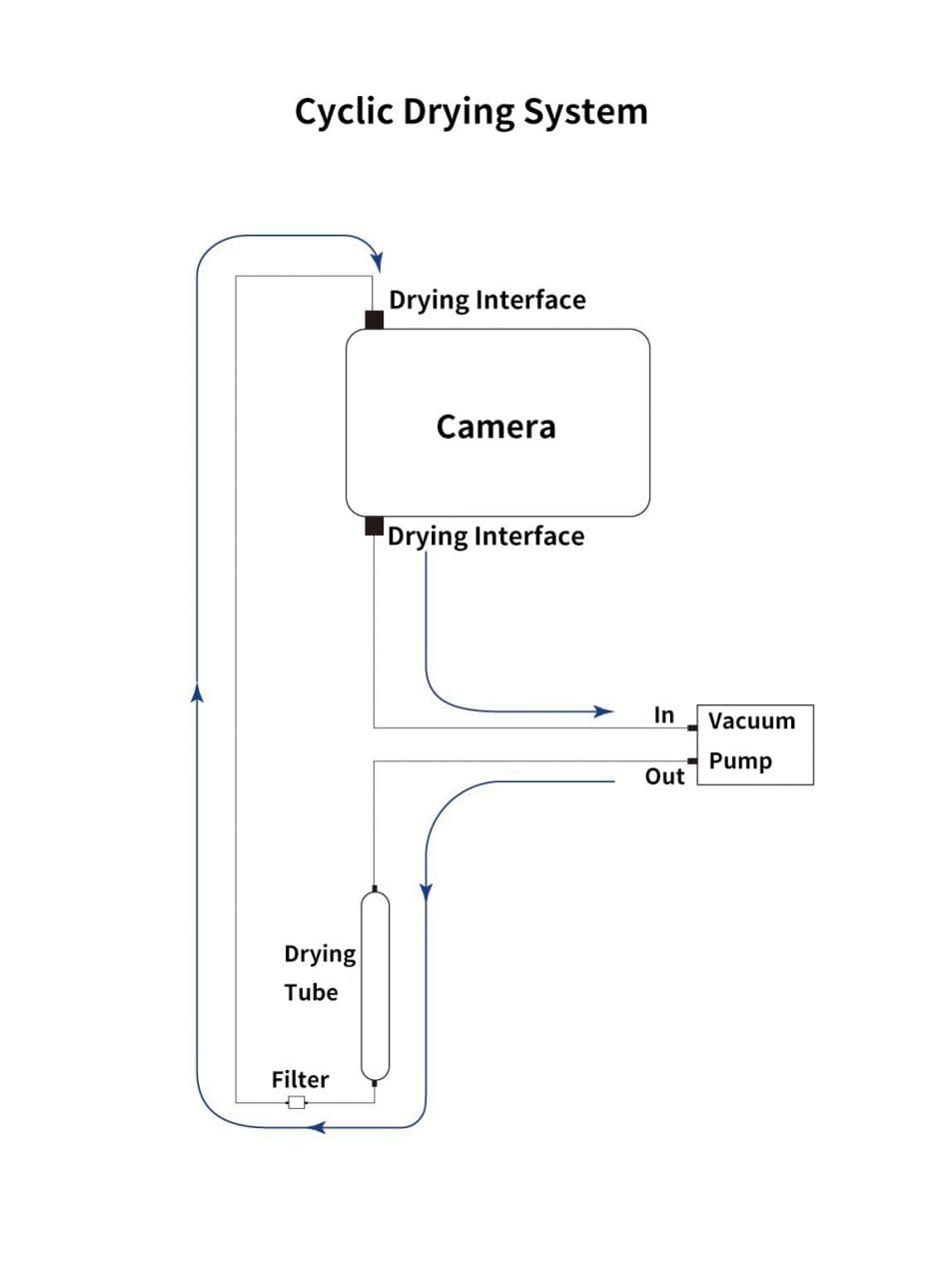
Please note that you may need to prepare desiccants yourself, because for most countries and regions desiccants are prohibited by air transport. Since QHY always deliver your goods by air, sorry that we can’t provide desiccants for you directly. - Cyclic Drying: The front end of the camera body is equipped with two drying interfaces with M5 threads, which are used in conjunction with drying tubes and circulation pumps for drying treatment inside the sensor chamber. The position of the drying interface is indicated by the red circle in the figure below (take the QHY600 as an example):Under the vacuum pump, the gas inside the sensor chamber is drawn out through one drying interface, enters the drying tube, and then undergoes filtration. It is then reintroduced into the camera through the other drying interface, circulating back and forth for drying.
Note:1.Do not reverse the order of the intake and exhaust ports
2.Before circulating drying, it is necessary to turn off the refrigerator, and then turn on circulating drying after the temperature returns to normal temperature. Only by following this step can the water vapor in the sealed chamber be effectively removed. If the cooler is turned on, the cooler inside the camera will absorb water vapor, causing more water vapor to condense inside the camera instead of being absorbed by the desiccant.


Cleaning the CMOS sensor and optical window
If you find dust on the CMOS sensor, you can first unscrew the front plate of the cam and then clean the CMOS sensor with a cleaning kit for SLR camera sensors. Because the CMOS sensor has an AR (or AR/IR) coating, you need to be careful when cleaning. This coating can scratch easily so you should not use excessive force when cleaning dust from its surface.
Preventing fogging of the CMOS chamber
All QHY cooling cameras have built-in heating plates to prevent fogging. However, If the ambient humidity is very high, the optical window of the CMOS chamber may have condensation issues. Then try the following:
1. Avoid directing the camera towards the ground. The density of cold air is greater than of hot air. If the camera is facing down, cold air will be more accessible to the glass, causing it to cool down and fog.
2. Slightly increase the temperature of the CMOS sensor .
3. Check if the heating plate is normally working. If the heating plate is not working, the glass will be very easy to fog, the temperature of the heating plate can reach 65-70 °C in the environment of 25 °C. If it does not reach this, the heating plate may be damaged. Please contact us for maintenance.
TE Cooler Maintenance
Please avoid thermal shock during use. Thermal shock refers to the internal stress that the TE cooler has to withstand due to the thermal expansion and contraction when the temperature of the TEC suddenly rises or falls. Thermal shock may shorten the life of the TEC or even damage it.
Therefore, when you start using the TEC to adjust the CMOS temperature, you should gradually increase the TEC power rather than turning the TEC to maximum power. If the power of the TEC is high before disconnecting the power supply, you should also gradually reduce the power of the TEC and then disconnect the power supply.
QHYCCD BURST Mode
QHYCCD BURST Mode
Added functions related to BURST mode in SDK. Currently, cameras that support Burst function include QHY600, QHY411, QHY461, QHY268, QHY6060, QHY4040, QHY4040PRO, QHY2020, QHY42PRO, QHY183A
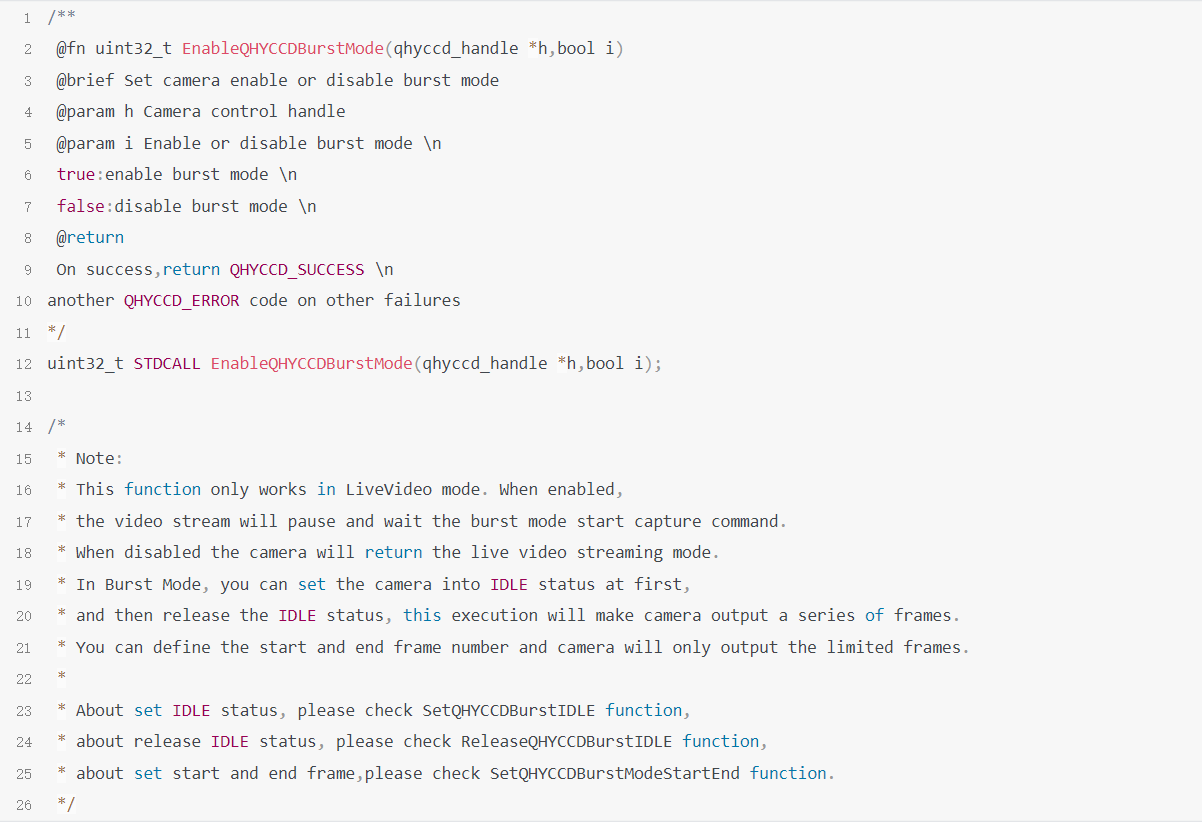
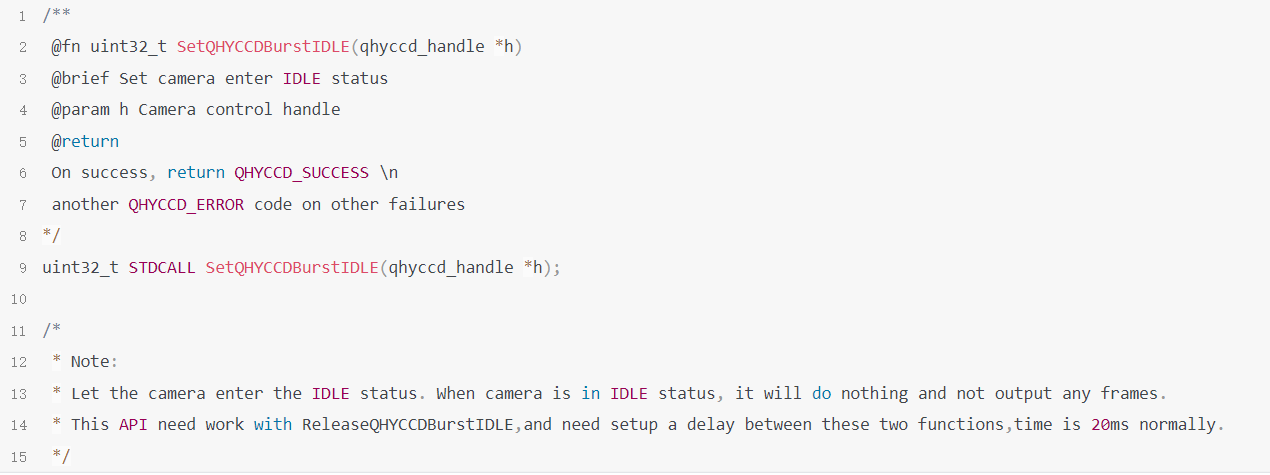
This mode is a sub-mode of continuous mode. This function can only be used in continuous mode. When this function is enabled, the camera will stop outputting image data, and the software frame rate will be reduced to 0. At this time, send relevant commands to the camera, and the camera will Output the image data with the specified frame number according to the settings, for example, set Start End to 1 6, the camera will output the image data with the frame number 2 3 4 5 when receiving the command.
Note:
1. When using Burst mode in fiber mode, the first Burst shot will be one less. For example, if the start end is set to 1 6, the output of 2 3 4 5 is normal, but in fact, only 3 4 will be output during the first burst shot. 5, 2 will not be received, the second and subsequent shots can normally obtain Burst images 2 3 4 5. This problem will be fixed later.
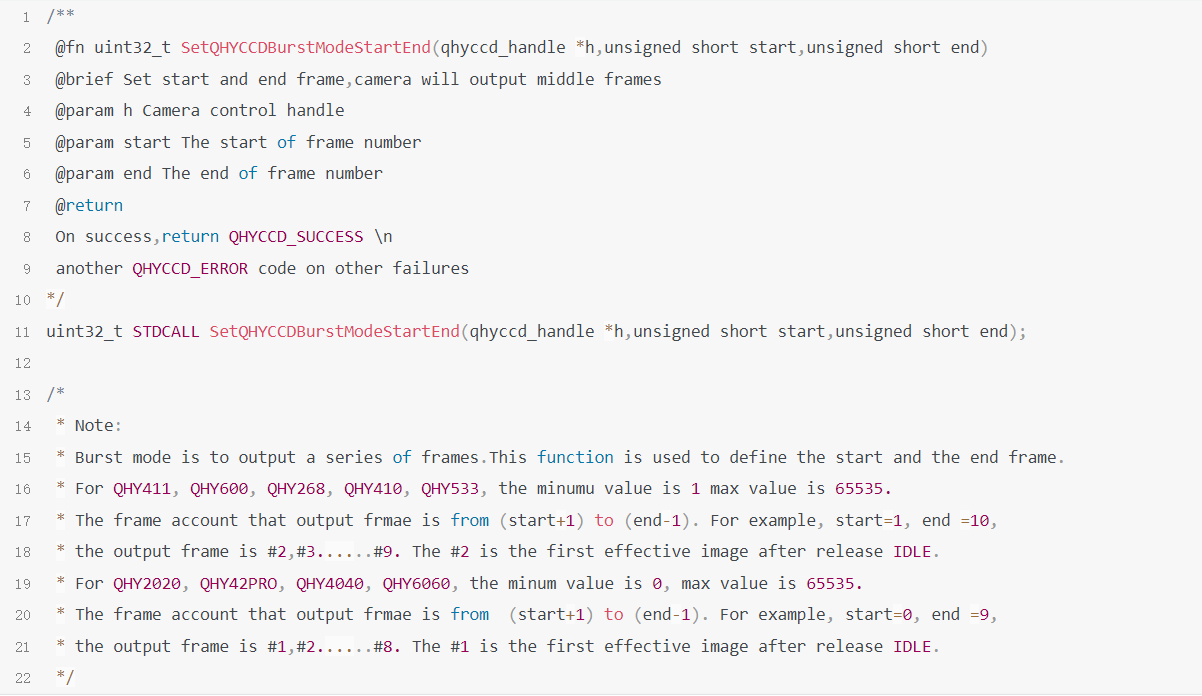
2. QHY2020, QHY4040 found that the frame number that came out when the exposure time was short is [start+1,end-1] but the one that came out under long exposure was [start+2,end]
3. When the camera is just connected, if the set end value is relatively large, the camera will directly output the picture after entering the burst mode. Therefore, it is necessary to set the camera to enter the IDLE state and then set the start end and related burst operations.
The following is the usage of Burst mode related functions:
1.EnableQHYCCDBurstMode
2.SetQHYCCDBurstModeStartEnd
3.SetQHYCCDBurstIDLE
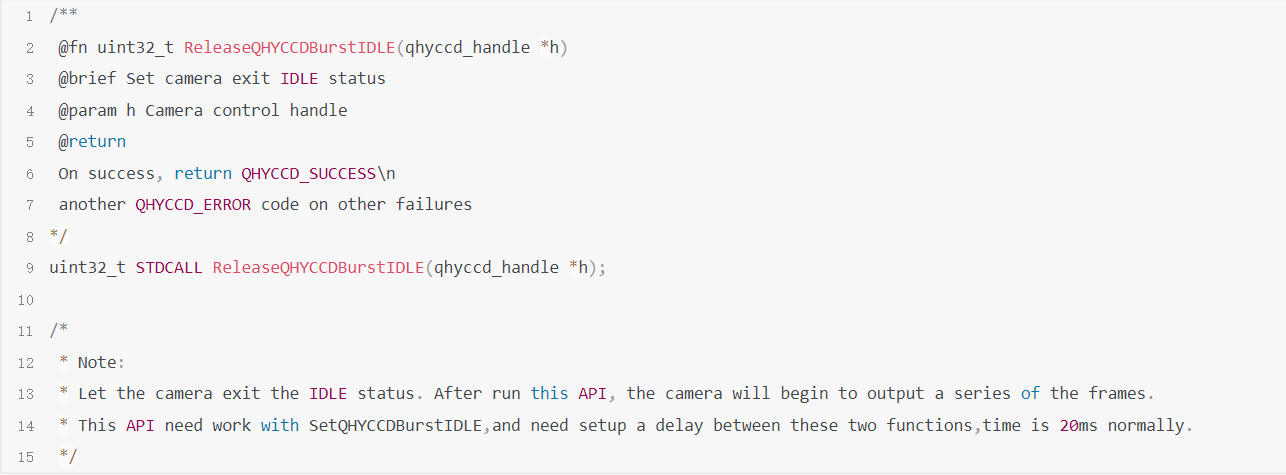
4.ReleaseQHYCCDBurstIDLE
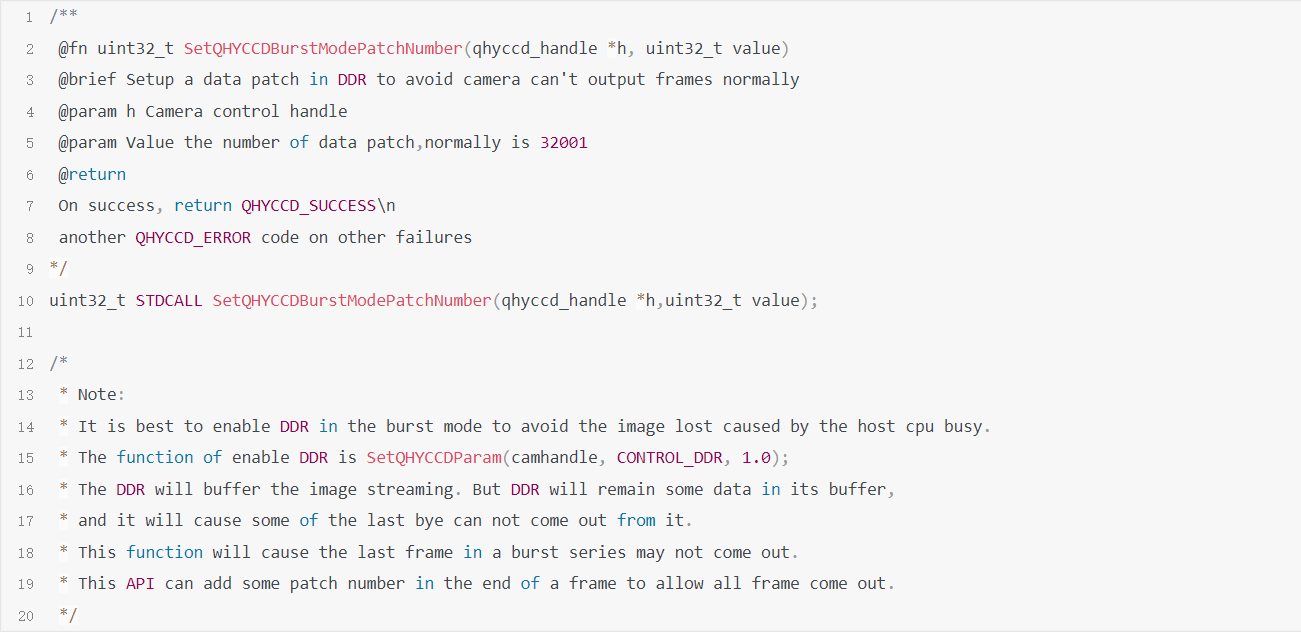
5.SetQHYCCDBurstModePatchNumber
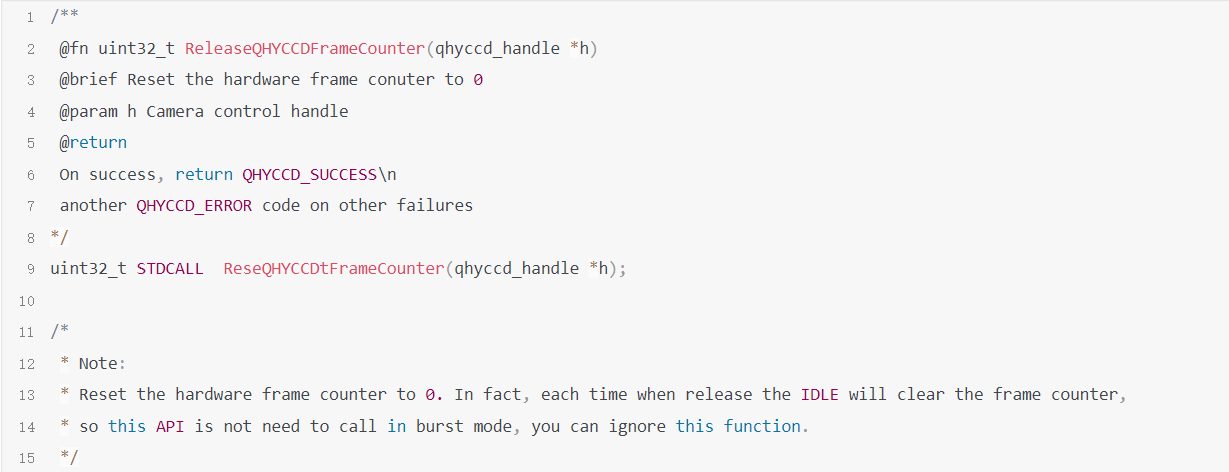
6.ReseQHYCCDtFrameCounter
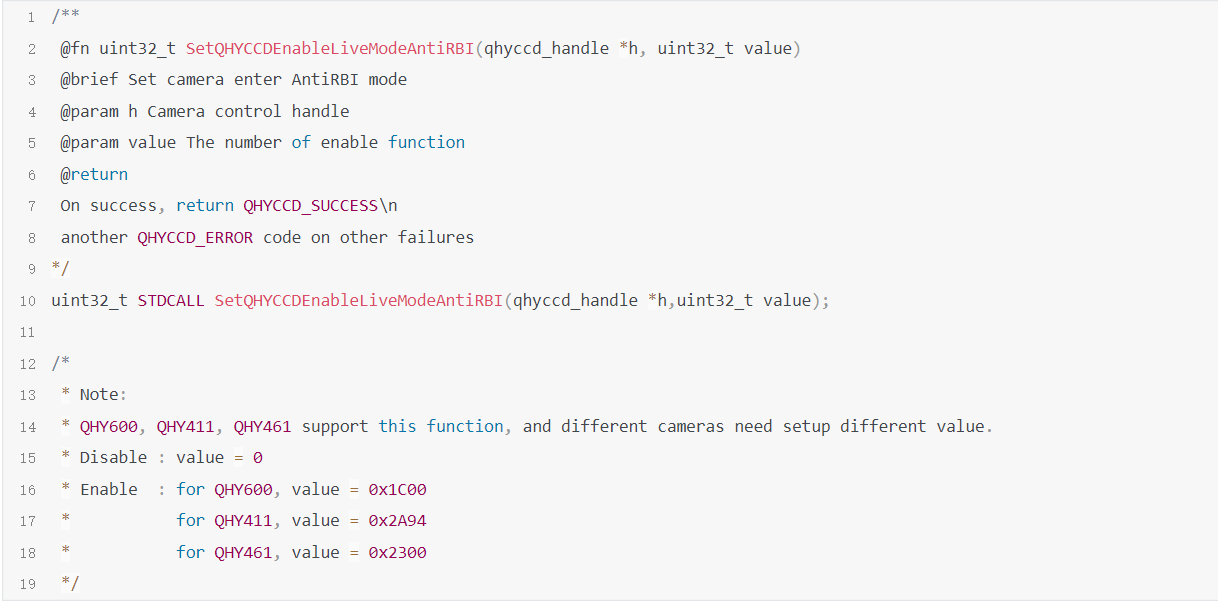
7.SetQHYCCDEnableLiveModeAntiRBI
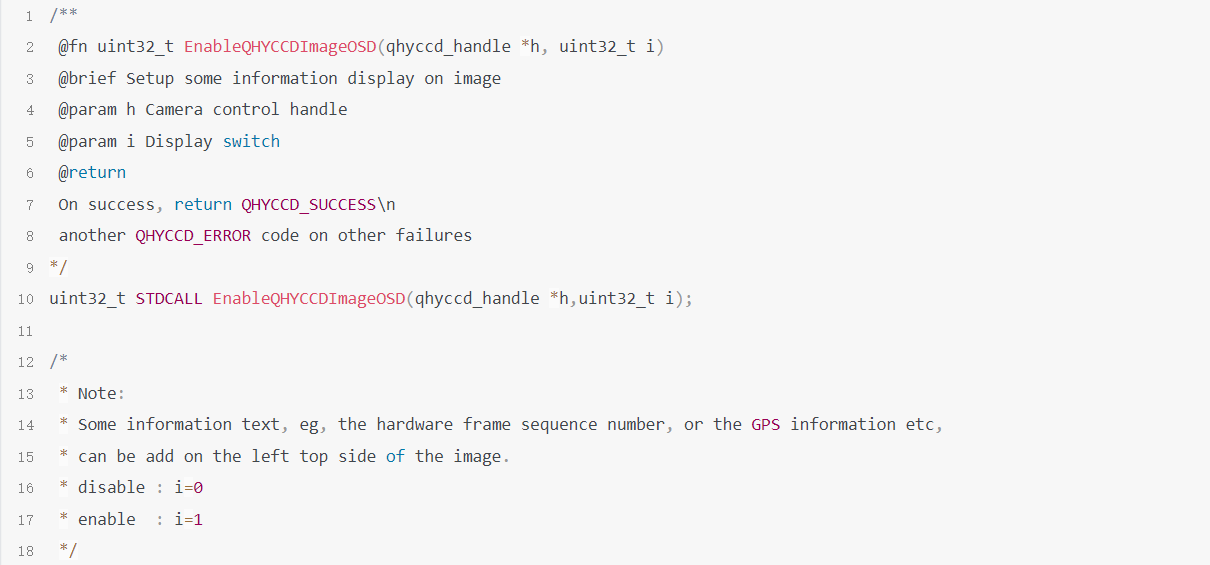
8.EnableQHYCCDImageOSD
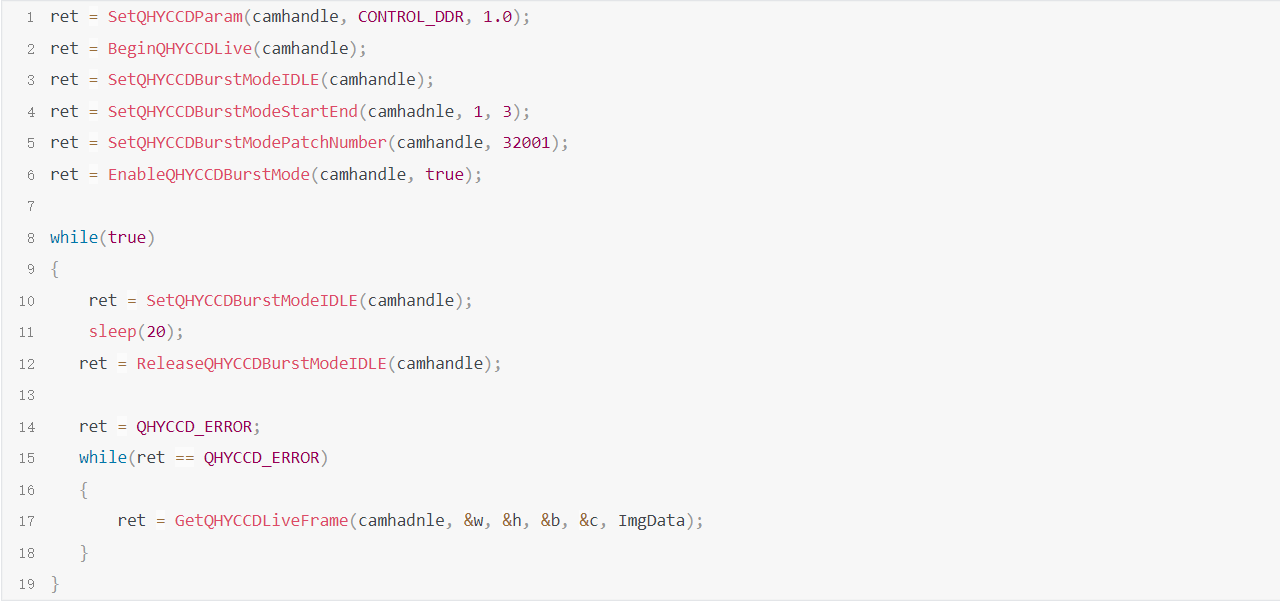
Sample Code
Appendix: UVLO Function
UVLO(Under Voltage Locking), is primarily intended to protect the electronic device from damage caused by abnormally low voltages. Now only QHY600, QHY268, QHY410, QHY411, QHY461, QHY533 cameras have UVLO Protection.
UVLO warning execution
After a warning is given, the camera firmware will automatically turn off the cooler and will turn on the camera’s TEC protection mode. After the camera is reconnected, it will always work in TEC protection mode (maximum power cooler power will be limited to 70%). Since many times the voltage shortage is caused by the high resistance of the power supply cable itself, resulting in a large voltage drop at high currents, the voltage will usually rise after the power is limited. But limiting the power will affect the cooling temperature difference. Therefore, it is recommended that users first check the power supply cable to solve the problem of excessive resistance of the power supply cable.
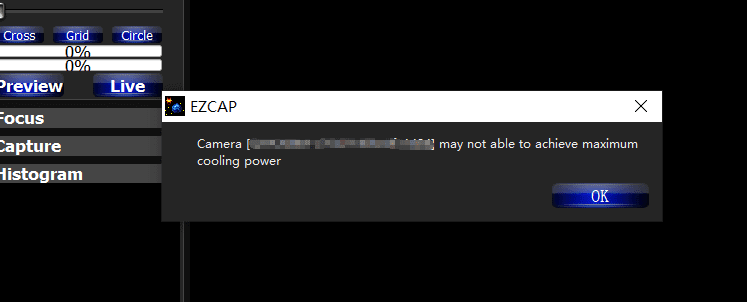
If the user has solved the problem of insufficient supply voltage, the TEC protection mode can be removed through the menu of EZCAP_QT.
How to improve the power supply?
- Make sure the output voltage of the AC adapter is not less than 12V and the maximum output current can reach 4A or more. Otherwise, the AC adapter itself will not meet the power demand of the camera and it may cause a low voltage problem.
- Make sure that the 12V power supply cable connecting the AC adapter to the camera has a low impedance. The impedance of the positive and negative paths should not exceed 0.1 ohms each. Or the total impedance (positive + negative) should not exceed 0.2 ohms. Otherwise, the power supply cable should be thickened.
- When using battery power, it is recommended to add a 12V output voltage regulator. If the battery is connected directly, usually the battery voltage reaches 13.8V when fully charged, and will gradually drop during use. It is easy to cause the camera to reach the low-voltage detection threshold.
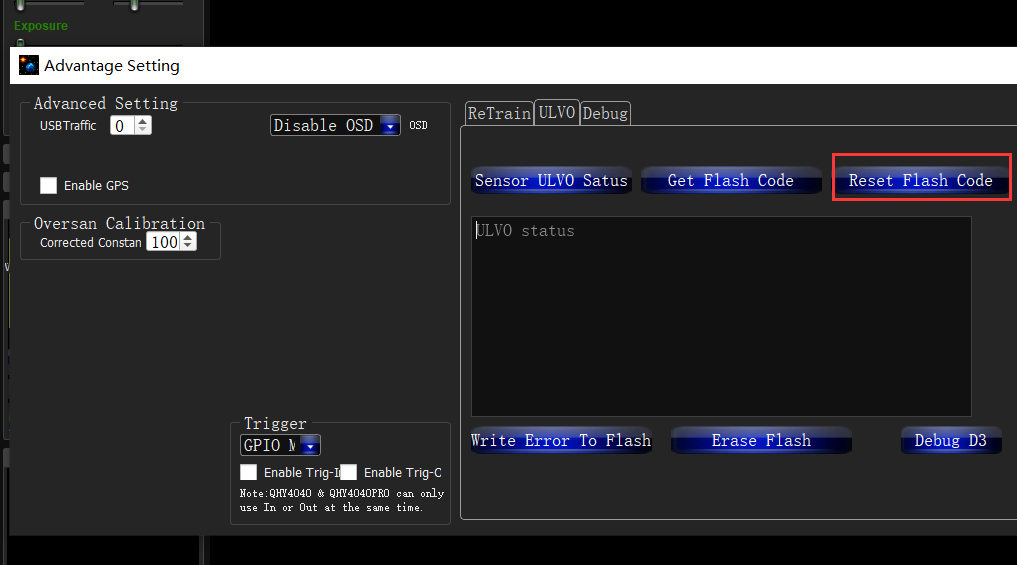
How to clear the TEC protection status triggered by UVLO?
Once a UVLO event occurs, the camera will automatically memorize it and will work in a protected mode at a maximum of 70% power after reconnection. This memory can be erased as follows:
After you find the system error, you need to turn off the device and check the power supply. After inspecting the problem, open the ezcap software and select “Camera Settings” – “Preferences” – “Reset Flash Code” to reset the error status.
Why does the warning appear even though the power supply voltage is 12 V?
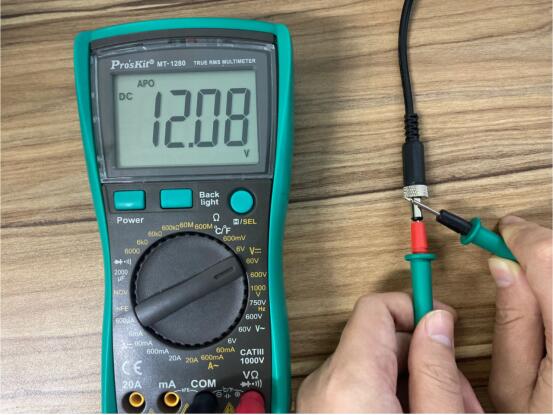
- The voltage measured inside the camera is the voltage reaching the camera, not the voltage at the power adapter end. Therefore, the voltage measured at the power adapter end does not reflect the voltage received at the camera end. This is because the power cable has its own resistance. If the resistance is large, it will cause a large voltage drop. The voltage drop can be calculated by U = I * R. So if the power cable has a resistance of 0.2 ohms, it will produce a voltage drop of 3.3 * 0.2 = 0.66V. If the power adapter output is 12 V, the voltage reaching the camera is 12 – 0.66 = 11.34 V. To actually measure the input voltage at the camera end, you can refer to the photo below.
- For cameras produced after September 2021, the UVLO is detected by communicating directly with the power manager, and the UVLO code that appears is 9, while for cameras produced before, the indirect detection method is used, and the UVLO code that appears is 3. The indirect detection method will detect UVLO except for the low voltage problem, and any other accident that causes CMOS not to work will also trigger the UVLO=3 alarm, for example, the camera is subject to severe electromagnetic interference, causing registers inside the CMOS not to work. Therefore, if UVLO=3 occurs, it is recommended to contact QHYCCD technical support for further judgment.
- Using older versions of drivers and firmware may cause false positives (UVLO=9). Please make sure that ALL-in-one SDK version is out of stable version 2021.10.23 or higher. Please disconnect the 12V power supply during the driver installation.
Updated: QHY600Pro 12bit High Speed Mode
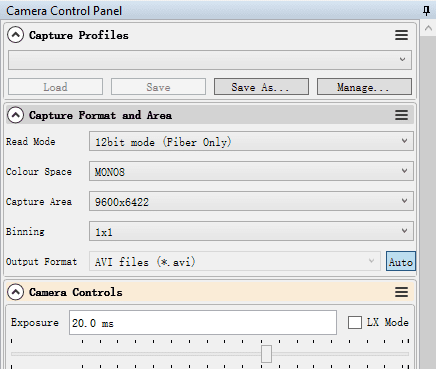 Added QHY600Pro 12-bit high-speed mode, applicable model: QHY600Pro (PCIE mode)
Added QHY600Pro 12-bit high-speed mode, applicable model: QHY600Pro (PCIE mode)
If you have certain needs for the frame rate of the device, such as meteor monitoring, etc., you can make selective updates. Since most of the software that provides continuous mode (i.e. video output), such as SharpCap, only supports 8-bit or 16-bit mode, you need to select 8-bit mode output to achieve frame rate improvement in 12-bit High-Speed Mode.
Data comparison (USB3.0 at full resolution):
Before upgrade: 8-bit, 4.0fps
After upgrade: 8-bit, (12-bit out), 18.0fps max.(Note: Due to the relatively large amount of data, the recommended memory speed is around 4000 MHz)
The implementation of this function requires updating the firmware, driver, and corresponding software SDKs at the same time.
Driver&SDK Required: Allinone package (BETA) 20220817 or later. Please turn to https://www.qhyccd.com/download/
Firmware Required: 20220824 or later. The zip package contains the firmware upgrade tool, the firmware, and firmware upgrade instructions. Please read the upgrade instructions in the firmware installation package carefully. If you encounter any problems during the upgrade, please contact QHYCCD.
Download Link:
User Guide: PCIE Grabber Card
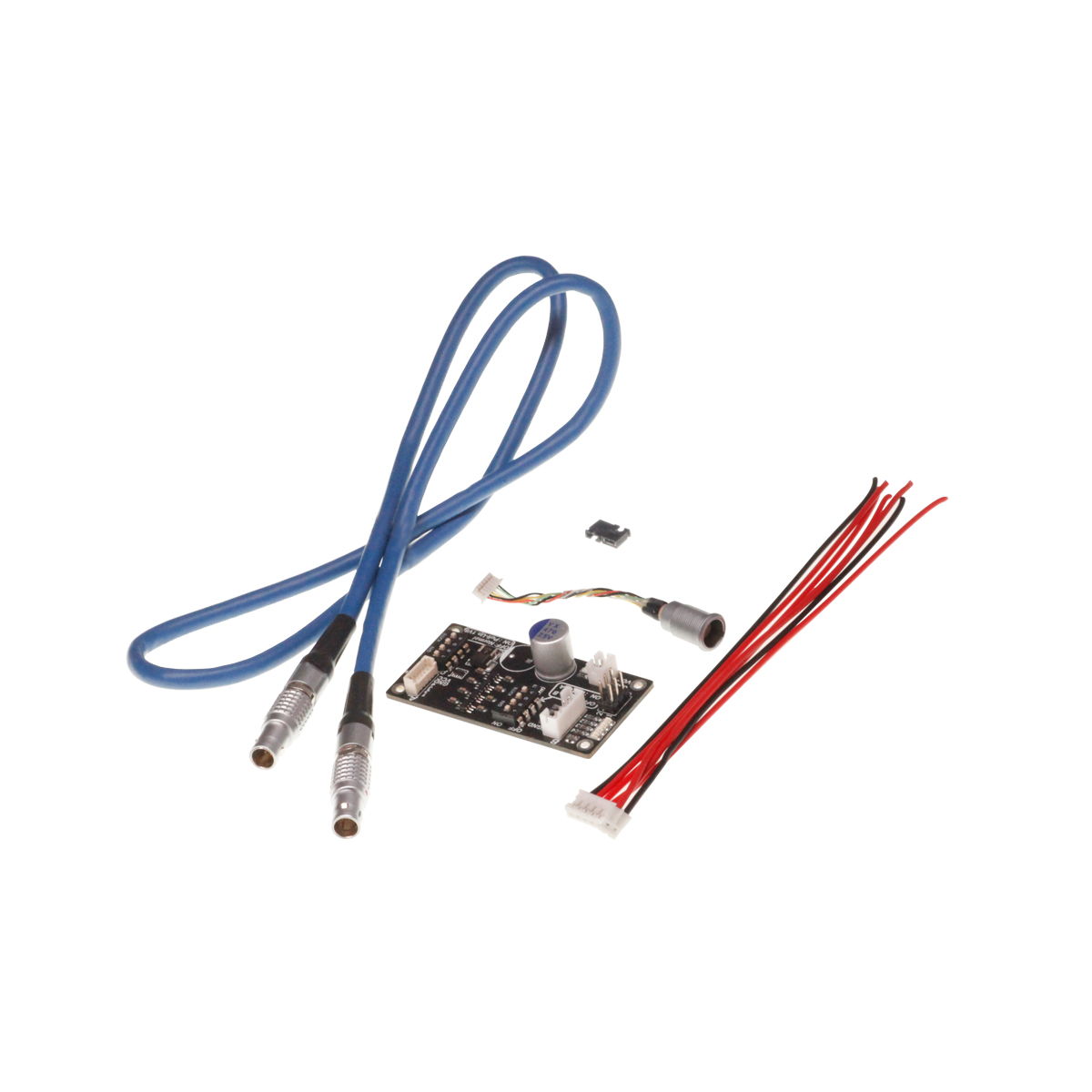
1. Prepare a computer that supports the PCIE interface. When purchasing the computer, please confirm with the seller whether it supports PCIE*8 or higher interfaces. Take out the QHYCCD Fiber PCIE Grabber card and its accessories, as follows:

2. Open the computer case and install the red PCIE Grabber card. (Please note: 1. The PCIE capture card supports PCIE 2.0, 2. Interfaces below PCIE*8 may affect the image frame rate.)
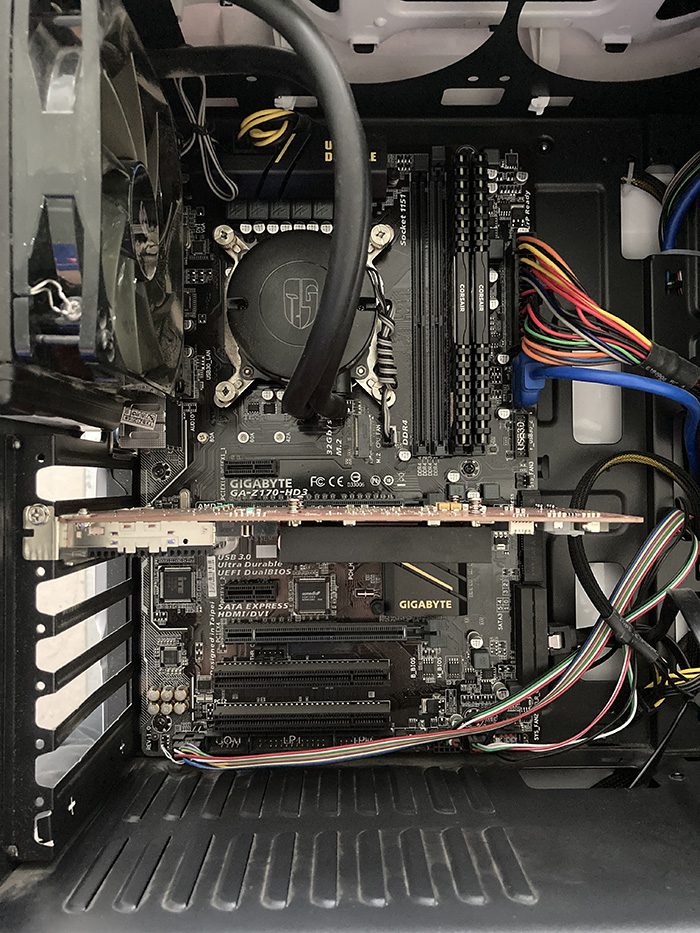
3. After the installation of the PCIE Grabber card is complete, restore the computer case panel. The installation should look like the following image:
4. To download and install the PCIE Grabber card driver, please log in to the QHY official website at https://www.qhyccd.com/file/repository/publish/pcie/PCIE-Driver-Sign-20-09-27.zip
Insert the PCIE Grabber card into slots 1 and 2 of your computer. Connect the camera’s optical port to the fiber module.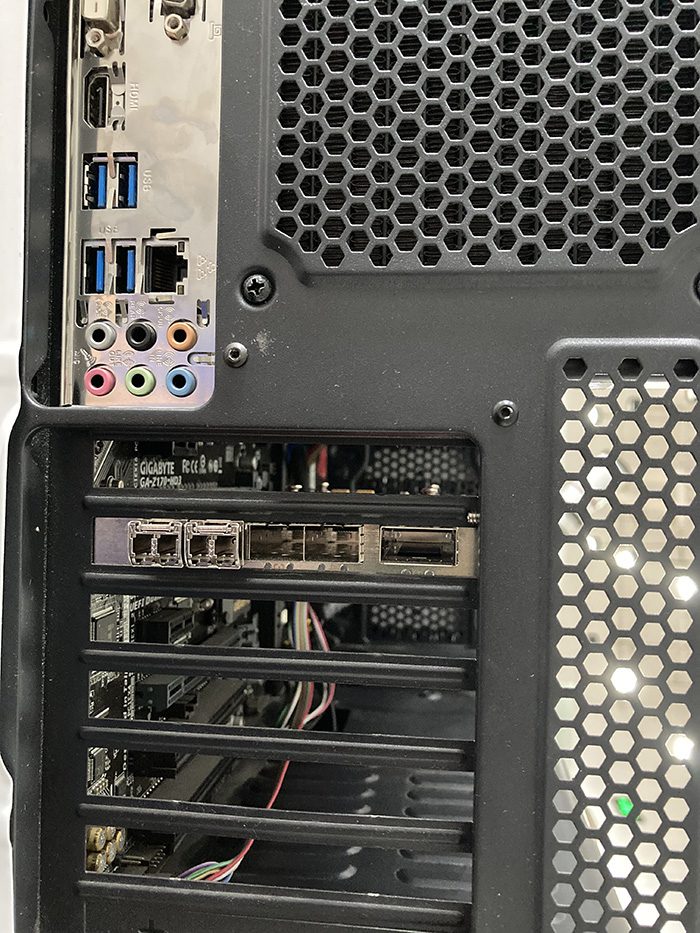
5. Connect the PCIE Graber card to the camera using a fiber optic cable. Please note that the sequence of the fiber optic cable interfaces should be as follows: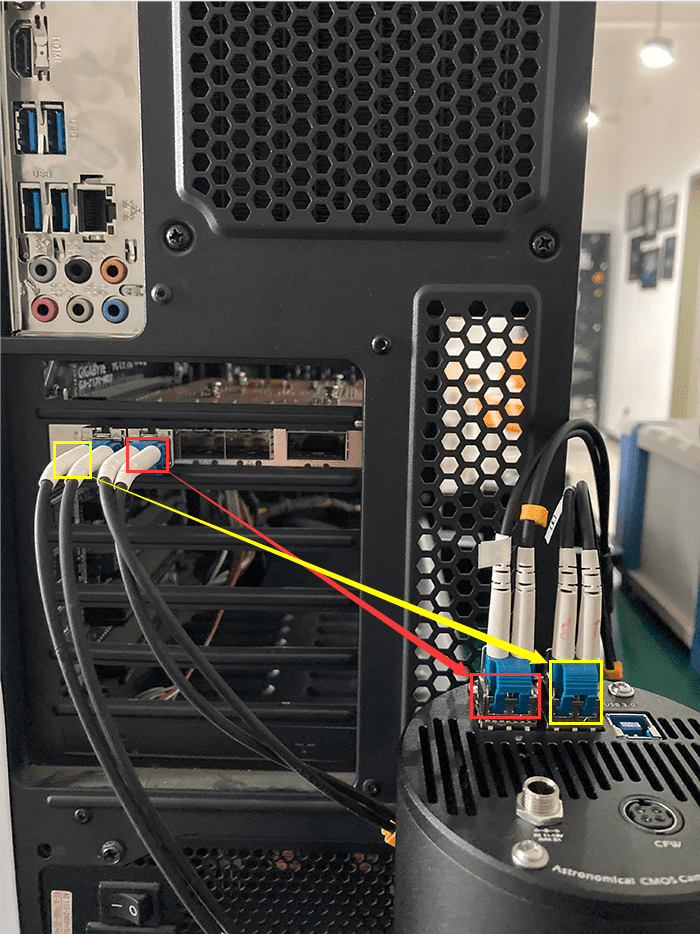
6. After confirming the connection sequence, power on the camera. (Note: Please use the official QHY-provided 12V6A power adapter.)
7. Start the software and select the QHY camera option in the software. Then, connect to the camera.