





Sample Images
 Monoceros Zone Mosaic
Monoceros Zone Mosaic
By @toni_fabiani
Lens: Samyang 135mm F2.0 ED UMC
Camera: QHY294M Pro
Mount: SkyWatcher EQ6 Pro
Frames: Hα: 52×600″
SII: 40×600″
OIII: 30×600”
SII: 40×600″
OIII: 30×600”
Total Integration: 20h20′
Overview
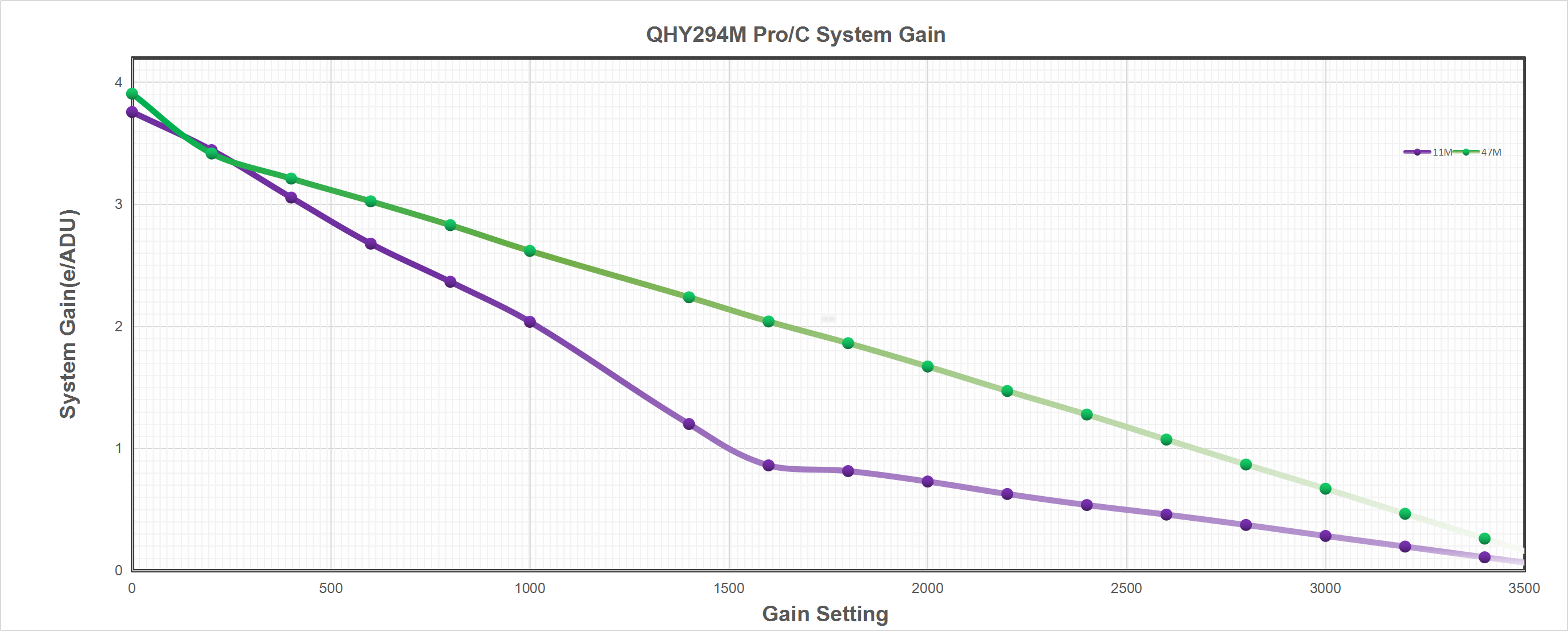
The294Pro has 11.7 MP at 4.63um, 14-bits A/D. IMX492 chips have 46.8 million 2.315um pixels, which Sony 2×2 bins on-chip to create the sensor’s advertised 11.7 million 4.63um pixel array.
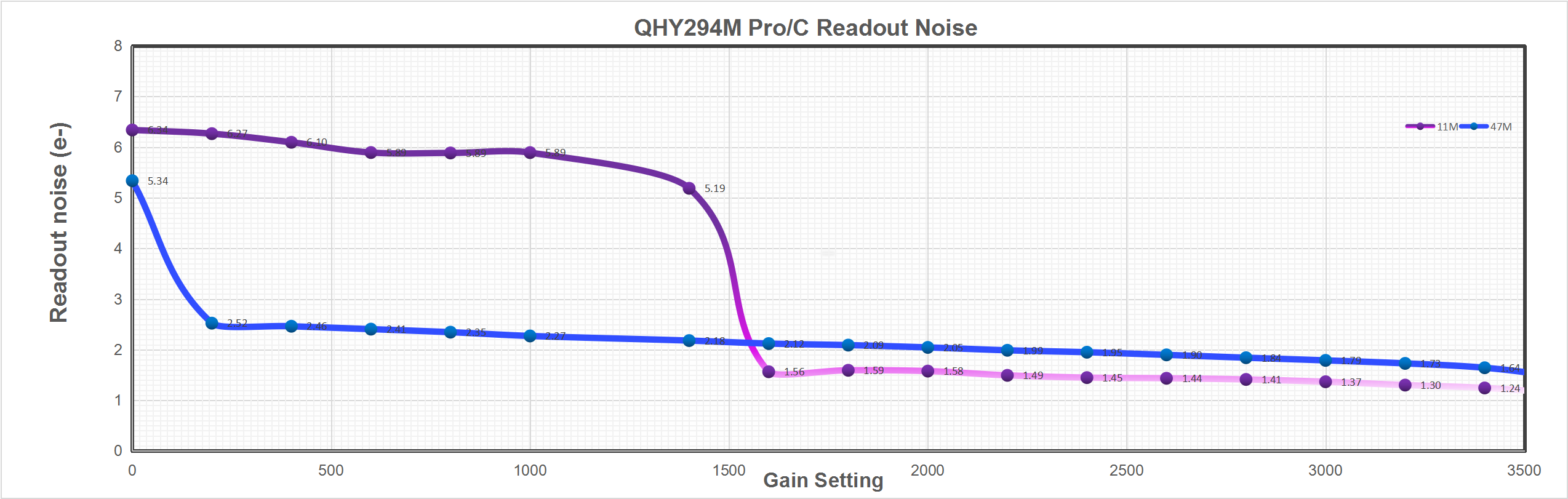
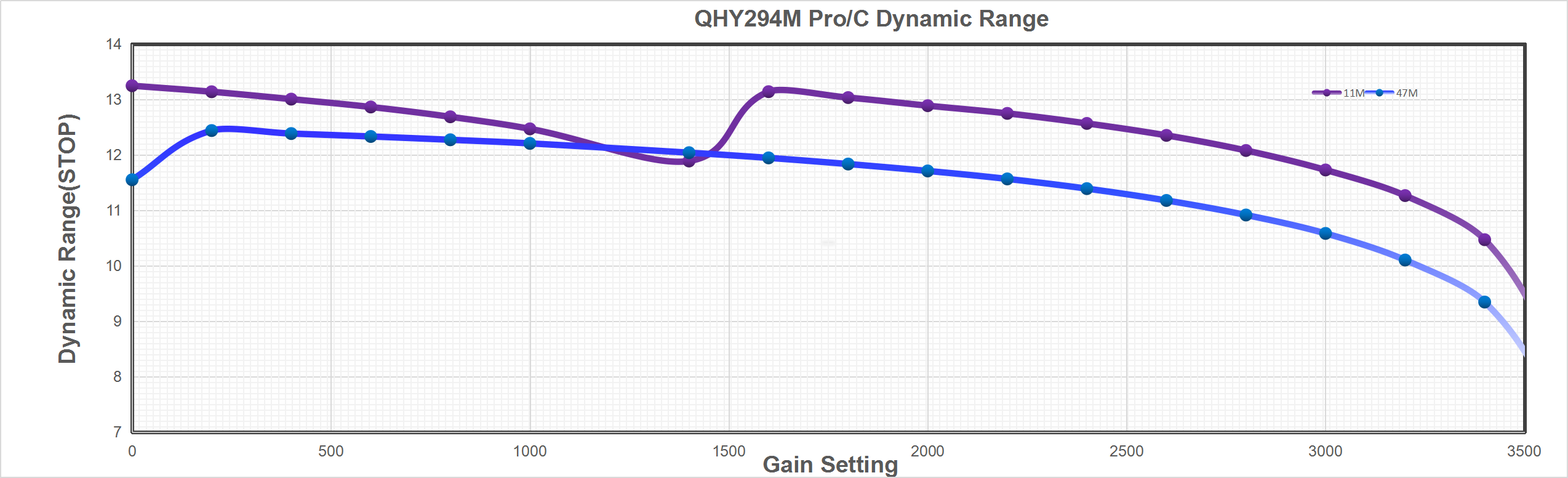
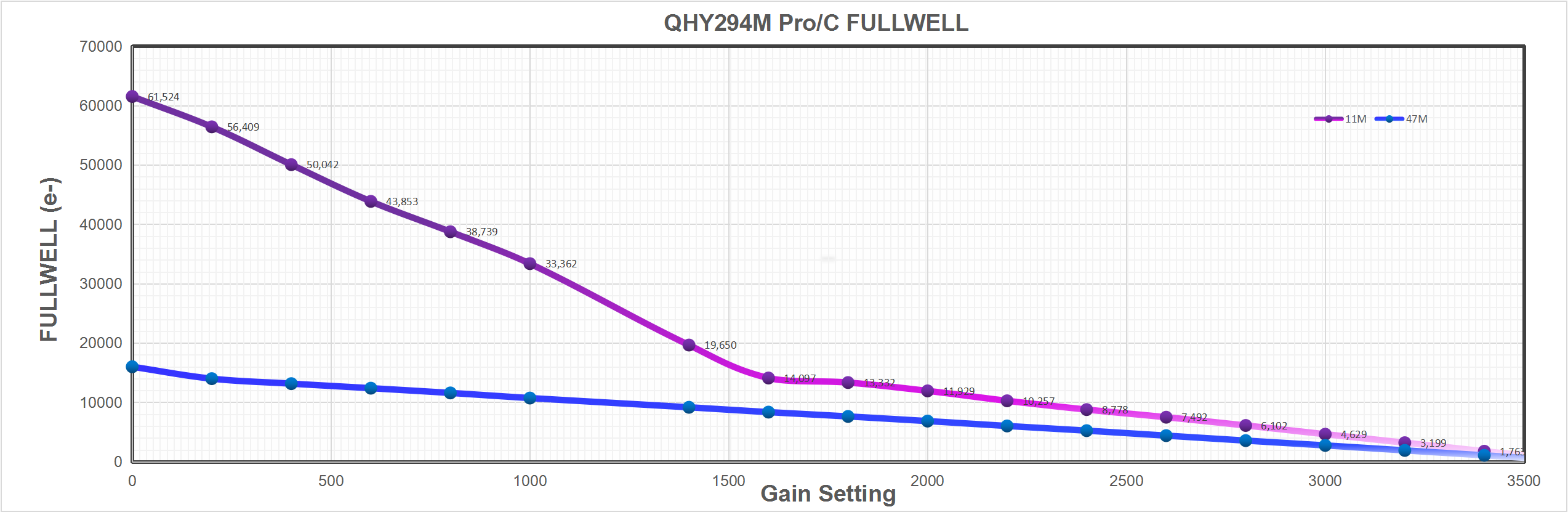
The QHY294 Pro CMOS sensor has a dual gain mode, HGC (high gain) and LGC (Low gain). The QHY294 Pro will switch the two modes automatically when the gain is set to 1600 you will get the benefits of the ultra low read noise (1e- to 1.6e-) of the HGC mode and a full well capacity of about 14.5ke- at the switch point setting.
 BSI
BSI
One benefit of the back-illuminated CMOS structure is improved full well capacity. In a typical front-illuminated sensor, photons from the target entering the photosensitive layer of the sensor must first pass through the metal wiring that is embedded just above the photosensitive layer. The wiring structure reflects some of the photons and reduces the efficiency of the sensor.
In the back- illuminated sensor the light is allowed to enter the photosensitive surface from the reverse side. In this case the sensor’s embedded wiring structure is below the photosensitive layer. As a result, more incoming photons strike the photosensitive layer and more electrons are generated and captured in the pixel well. This ratio of photon to electron production is called quantum efficiency. The higher the quantum efficiency the more efficient the sensor is at converting photons to electrons and hence the more sensitive the sensor is to capturing an image of something dim.
 TRUE RAW Data
TRUE RAW Data
In the DSLR implementation there is a RAW image output, but typically it is not completely RAW. Some evidence of noise reduction and hot pixel removal is still visible on close inspection. This can have a negative effect on the image for astronomy such as the “star eater” effect. However, QHY Cameras offer TRUE RAW IMAGE OUTPUT and produces an image comprised of the original signal only, thereby maintaining the maximum flexibility for post-acquisition astronomical image processing programs and other scientific imaging applications.
 Anti-Dew Technology
Anti-Dew Technology
Based on almost 20-year cooled camera design experience, The QHY cooled camera has implemented the fully dew control solutions. The optic window has built-in dew heater and the chamber is protected from internal humidity condensation. An electric heating board for the chamber window can prevent the formation of dew and the sensor itself is kept dry with our silicon gel tube socket design for control of humidity within the sensor chamber.
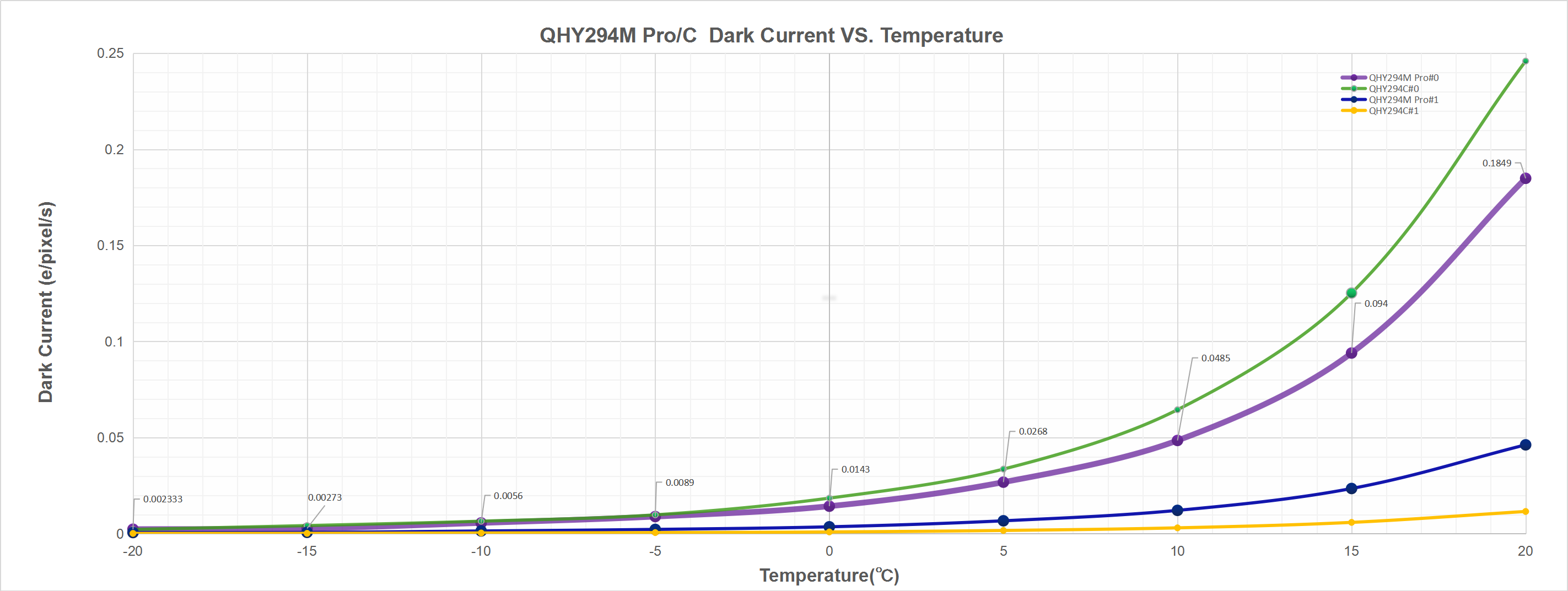
Cooling
In addition to dual stage TE cooling, QHYCCD implements proprietary technology in hardware to control the dark current noise.
Specifications
| Model | QHY294M Pro |
| CMOS Sensor | SONY IMX492 |
| Mono/Color | Mono Only |
| FSI/BSI | BSI |
| Pixel Size | 4.63μm*4.63μm |
| Effective Pixel Area | 4164*2796 |
| Total Pixel Area | – |
| Effective Pixels | 11.7 MP 46.8 MP(Extended Pixel Mode) |
| Sensor Size | 4/3 inch (19.28mm*12.95mm) |
| A/D | 14-bit A/D |
| Full Well Capacity (1×1, 2×2, 3×3) | 65ke- |
| Frame Rates | Standard 11.6mega pixel mode Full resolution: 16.5FPS@14bit ROI: 2160lines 21FPS 1080lines 41FPS 960lines 46FPS 768lines 56FPS 480lines 87FPS 240lines 156FPS 100lines 290FPS47mega pixel mode 8340*5644 4FPS@14bit and 8bit |
| Readout Noise | 1.6- to 1.2e- (High Gain Mode) 6.9- to 5.2e- (Low Gain Mode) |
| Dark Current | 0.002e-/pixel/sec @-20℃ 0.005e-/pixel/sec @-10℃ |
| Exposure Time Range | 60μs-3600sec |
| Recommend Gain* | 1600 (11MP Mode) 2600 (47MP Mode) |
| Amp Control | Amplifer Glow Can be reduced during long exposure |
| Shutter Type | Electronic Rolling Shutter |
| Computer Interface | USB3.0 |
| Built-in Image Buffer | 256MB DDR3 Memory Buffer |
| Cooling System | Dual Stage TEC cooler(about -35℃ below ambient, test temperature +20℃) |
| Optic Window Type | AR+AR High Quality Multi-Layer Anti-Reflection Coating |
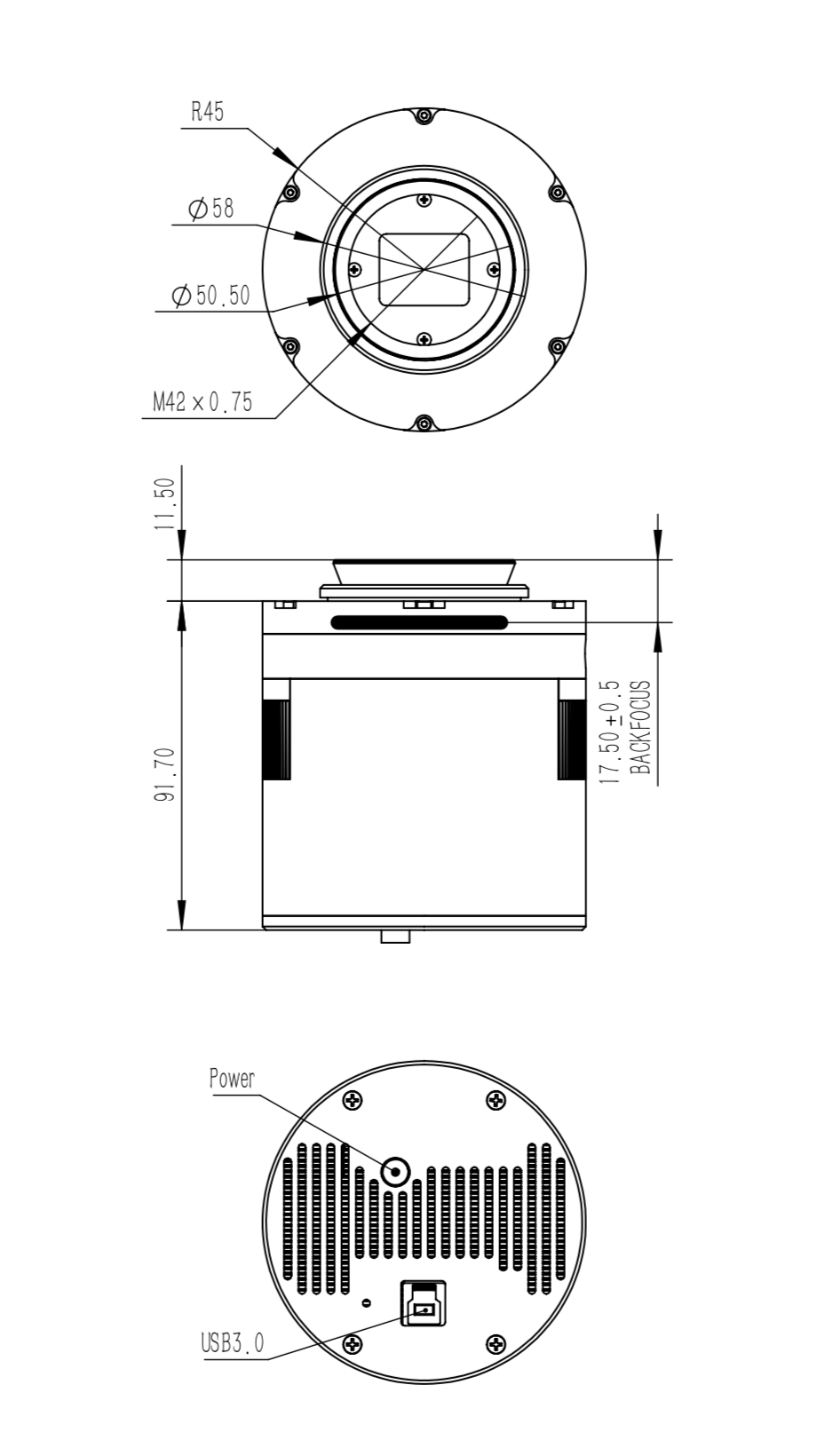
| Telescope Interface | M42/0.75 |
| Back Focal Length *Learm more: https://www.qhyccd.com/adapters/ |
17.5mm(±0.2) |
| Anti-Dew Heater | Available |
| Humidity Sensor | – |
| Firmware/FPGA remote Upgrade | – |
| Weight | 650g |
Curves
Mechanical dimensions
User Interview
【User Interview】Justin P‘s Astrophotography Story
【User Interview】Amit Kamble’s Astrophotography Story
Accessories, Combos and Adapters
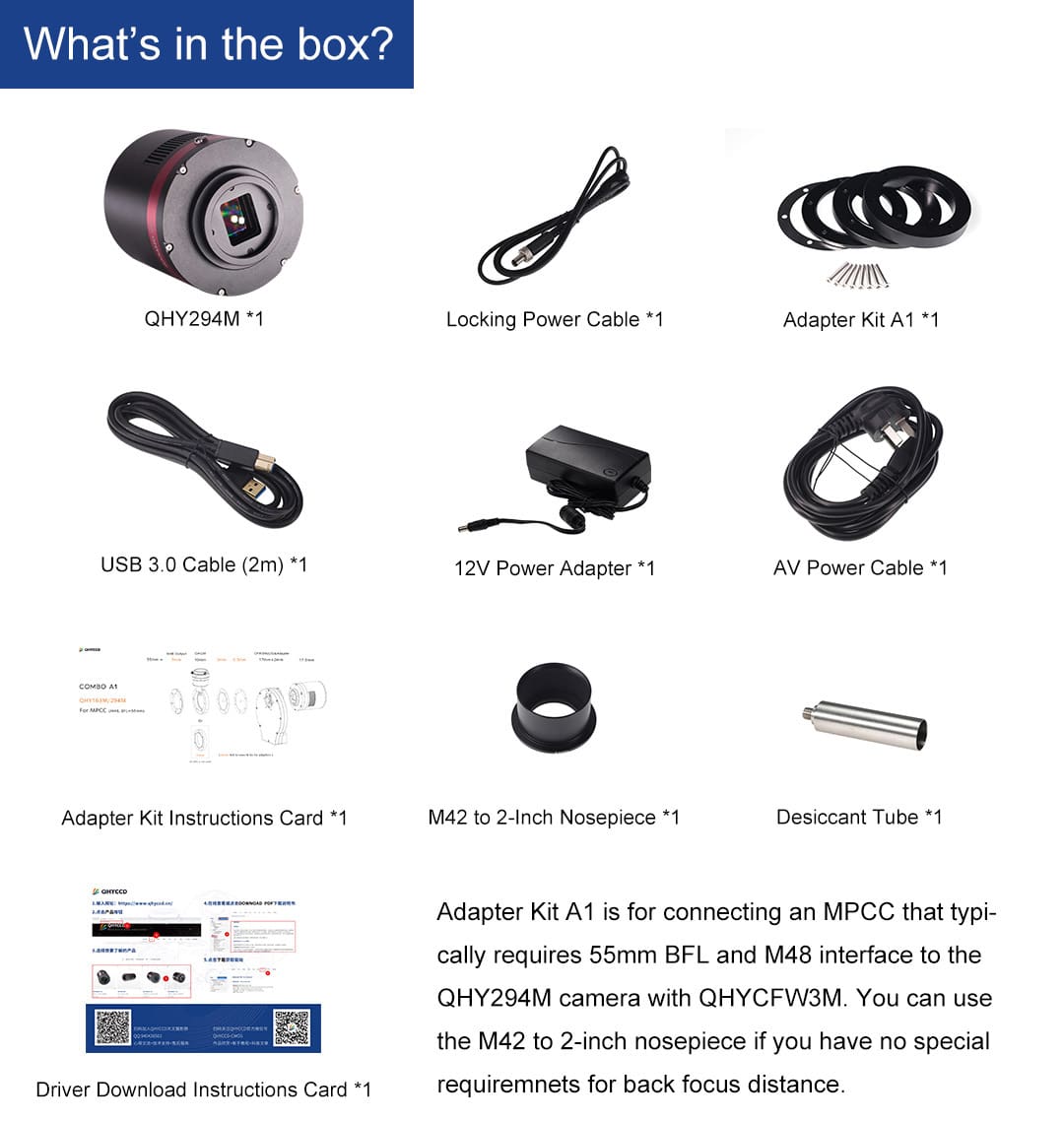
Combos and Adapters
For cameras with a sensor larger than 1-inch and smaller than APS-C (QHY163m/294m) we recommend a combination of CFW3M (US) + OAGM (optional);
| Model | BFL Consumed | Filters Supported |
| QHY163M/294M | 17.5mm | 7 position
36mm unmounted |
| CFW3M-US | 17.5mm | |
| OAGM | 10mm |
Back Focal Length (BFL), in the commercial camera field, refers to the design distance from the center of the rear lens element to the surface of the sensor. Generally, the lens will only focus correctly at infinity if the camera’s back focal length meets the standard requirements provided by the lens manufacturer. This is also true for many Multi-Purpose Coma Correctors designed to be used on telescopes before the camera.
| Optical system | Back focal length required |
| Typical Multi-Purpose Coma Corrector | 55mm – 57.5mm |
| Canon 35mm lens | 44.1mm |
| Nikon 35mm lens | 46.5mm |
A1: Connecting MPCC that requires 55mm BFL and M48 interface to Camera with Filter Wheel and OAG
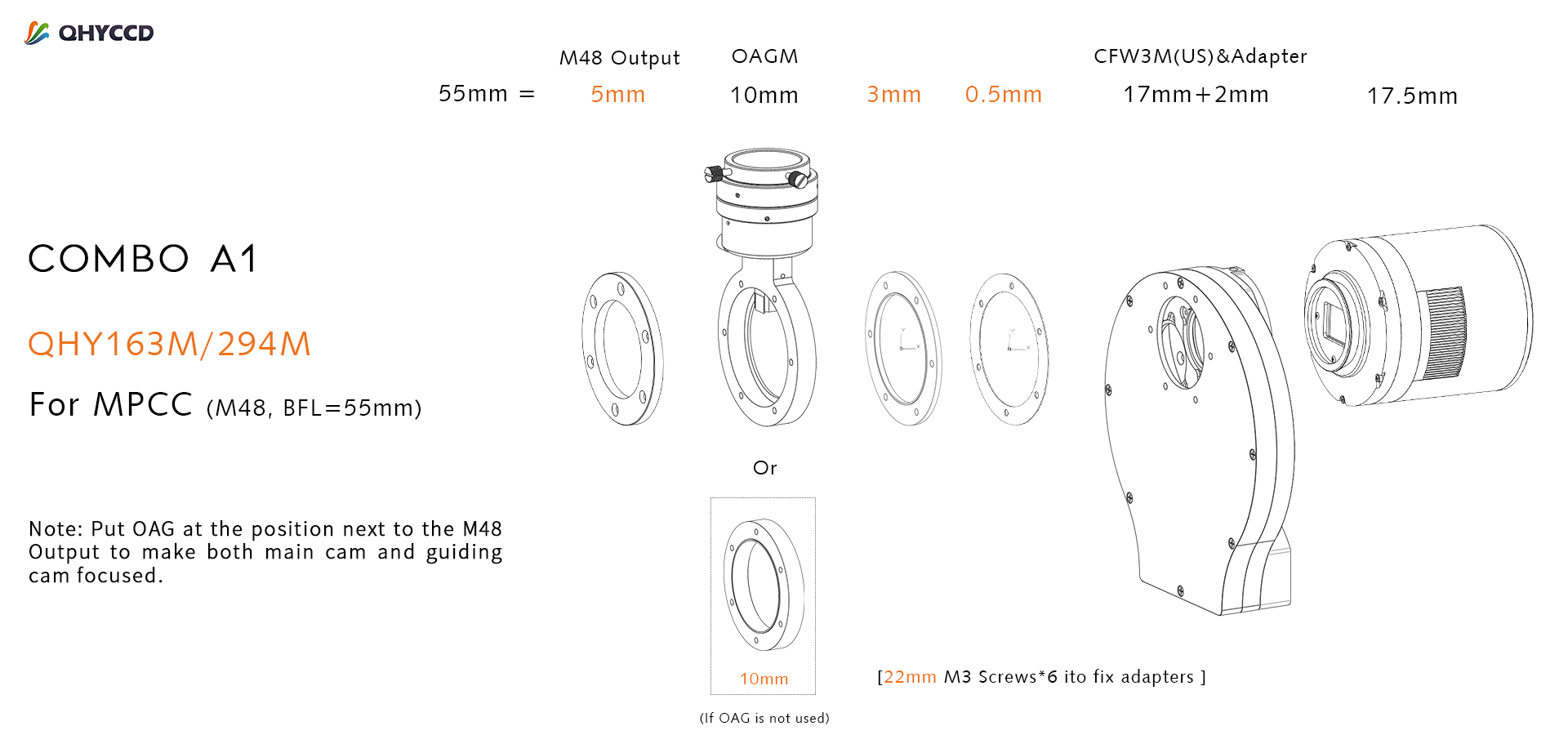
Note:
- If you only own CFW3M-SR whose BFL is 20.5mm rather than 17.5mm, this adapter combination can still be used, just remove the 3mm and 0.5mm adapters.
- If your MPCC requires a BFL different from 55mm, this adjustment can be made by selecting the appropriate spacer between the MPCC and the OAG. For example, an MPCC that requires 57.5mm can be used instead by adding a spacer ring or rings that add 2.5mm of BFL. to the diagram above.
- If you don’t use an OAG, you can use a 10mm spacer adapter in the adapter kits to replace the original position of OAG.
- Put OAG at the position next to the M48 Output to make both main cam and guiding cam focused.
A2: Connect Canon lens with filter Wheel
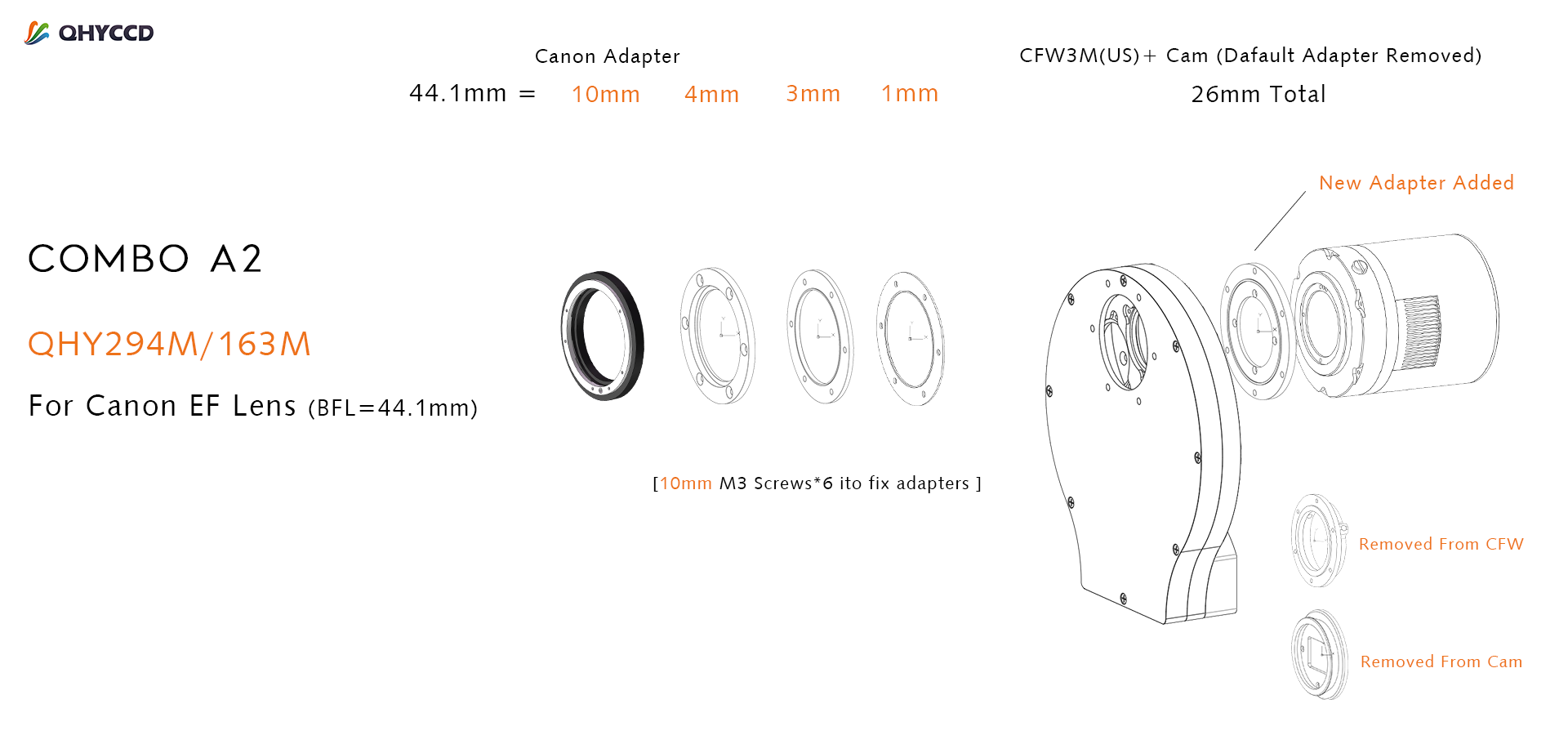
Note: You need to remove the filter wheel and the original connection interface of the camera and replace it with a new adapter.
A3: Connect Nikon F Lens to Camera with Filter Wheel

User Guide: Start the Camera
Install “All-In-One” Driver&SDK Pack
Before Start: Input Voltage Requirements
The camera requires an input voltage between 11V and 13.8V. If the input voltage is too low the camera will stop functioning or it may reboot when the TEC power percent is high, causing a drain on the power. Therefore, please make sure the input voltage arrived to the camera is adequate. 12V is the best but please note that a 12V cable that is very long or a cable with small conductor wire may exhibit enough resistance to cause a voltage drop between the power supply and the camera. The formular is: V(drop) = I * R (cable). It is advised that a very long 12V power cable not be used. It is better to place the 12V AC adapter closer to the camera.
First connect the 12V power supply, then connect the camera to your computer via the USB3.0 cable. Make sure the camera is plugged in before connecting the camera to the computer, otherwise the camera will not be recognized. When you connect the camera for the first time, the system discovers the new device and looks for drivers for it. You can skip the online search step by clicking “Skip obtaining the driver software from Windows Update” and the computer will automatically find the driver locally and install it. If we take the 5IIISeries driver as an example (shown below), after the driver software is successfully installed, you will see QHY5IIISeries_IO in the device manager.
Please note that the input voltage cannot be lower than 11.5v, otherwise the device will be unable to work normally.
Install "All-In-One" System Pack
All-in-one Pack supports most QHYCCD models only except PoleMaster and several discontinued CCD cameras.
Download Page: https://www.qhyccd.com/download/
Video Tutorial: https://www.youtube.com/embed/mZDxIK0GZRc?start=1
- Since most of the contents of All-in-one package are plug-ins that support third-party software, the third-party capturing software that you want to use must be installed before the All-in-one package. Otherwise the program will report an error.
- ALL-IN-ONE Pack contains:
- System Driver, which is necessary for the camera operation and must be installed.
- WDM Broadcast Driver, which can provide a live signal to Obs and other live software, you can install it if you have such needs like opeing a live show.
- EZCAP_QT , which is developed by QHYCCD and can be used in QHY devices tests, and management of updates. So even if you won’t use EZCAP_QT for capturing, we suggest you install it.
- Ascom driver, which is necessary for the camera used in Ascom (the latest version of Ascom is 6.6).
- The two sorts of Ascom CFW Drivers correspond to two methods of controling the filter wheel: USB control and camera serial control. It is recommended that both drivers should be installed if you have a filter wheel.
- CP210X_VCP is a serial driver. Some computers come with the driver, but the computer without the driver may be failed of controling the filter wheel.
- SDKs for Third-party Software: Just pick and install the corresponding SDK according to the software you want to use. Don’t forget to check whether the software you are using is 32-bit or 64-bit and select the right SDKs.
- SHARPCAP is also included in the pack, you can choose 32-bit or 64-bit to install. This is authorized by SHARPCAP.
- QT LIB is a plug-in to ensure that 64-bit software can exeuate normally on some computers with poor compatibility.
- Difference between Stable version and Beta Version: Beta version is the latest version, which gives priority to support for the latest products (the stable version may not be compatible with those yet), and has some of the latest optimized ,but experimental features. The stable version is older than the beta version but more stable, so it is recommended for beginners who are not using the latest products.
- Don’t let the camera connect to the computer during the All-in-one pack installation process; connect it to the computer after all the installation is complete.
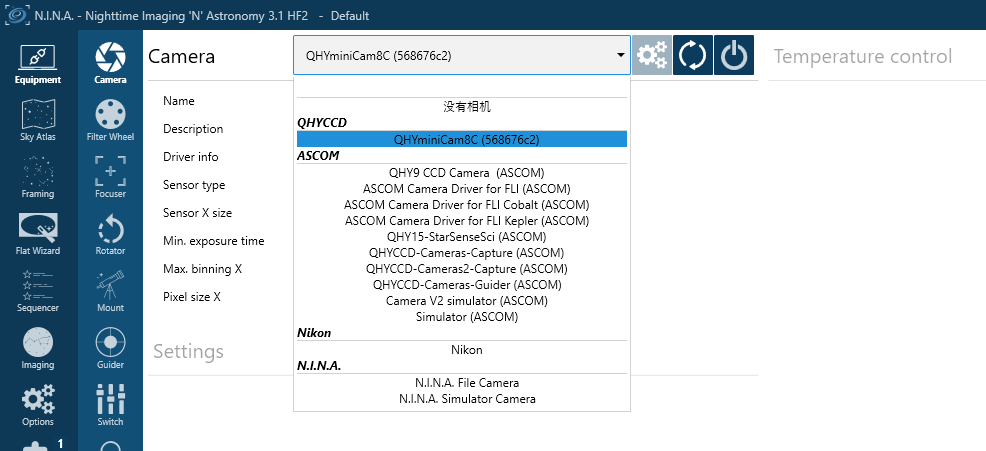
Connect DSO Imaging Software (e.g. NINA)
Before using software, make sure you have connected the cooling camera to the 12V power supply and connected it to the computer with a USB3.0 data cable. If it’s an uncooled camera, 12V power is not needed. We recommend 64-bit Software, like SharpCAP x64 , N.I.N.A x64. etc., especially when you’re using 16bit cameras.
NINA supports direct connection via the QHY plugin as well as connection through the ASCOM driver. The following instructions assume a direct connection using the QHY plugin.
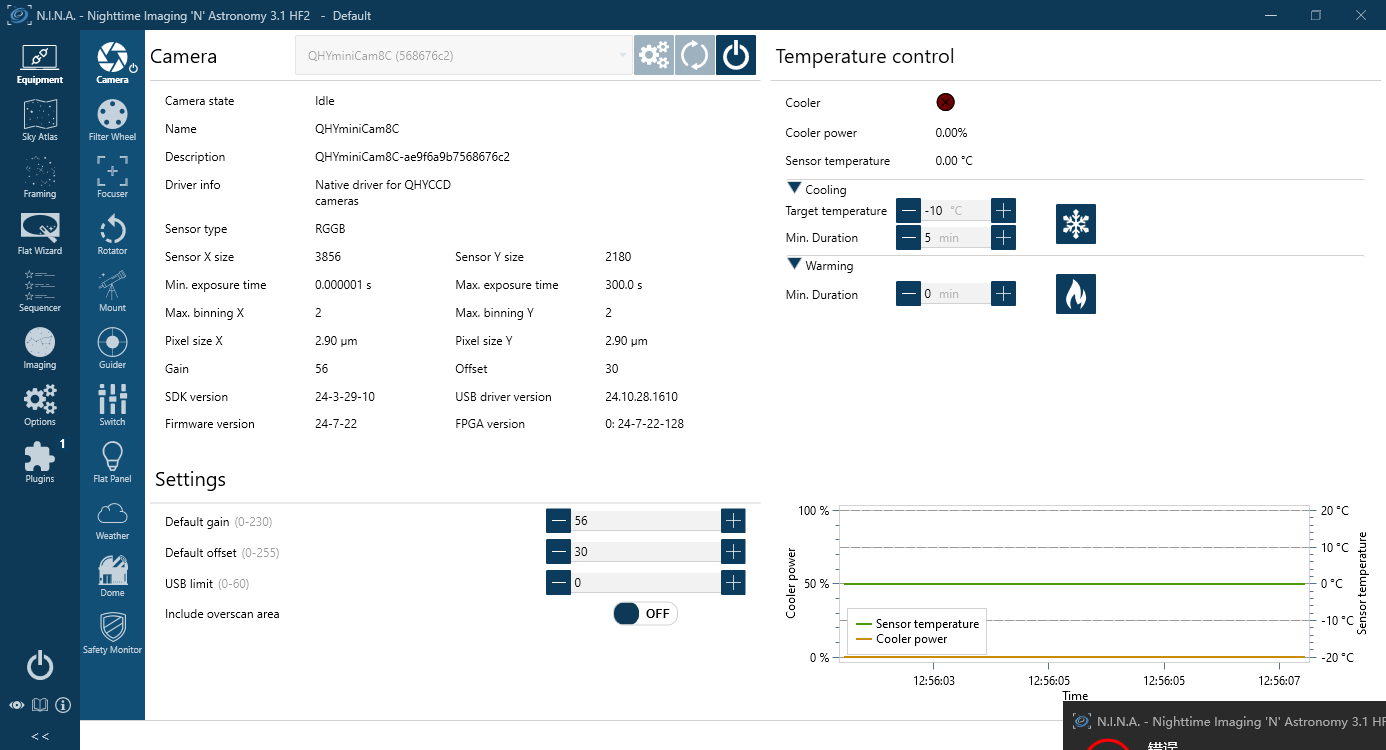
Set the Target temperature.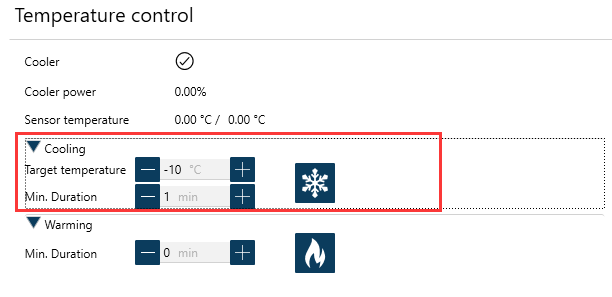
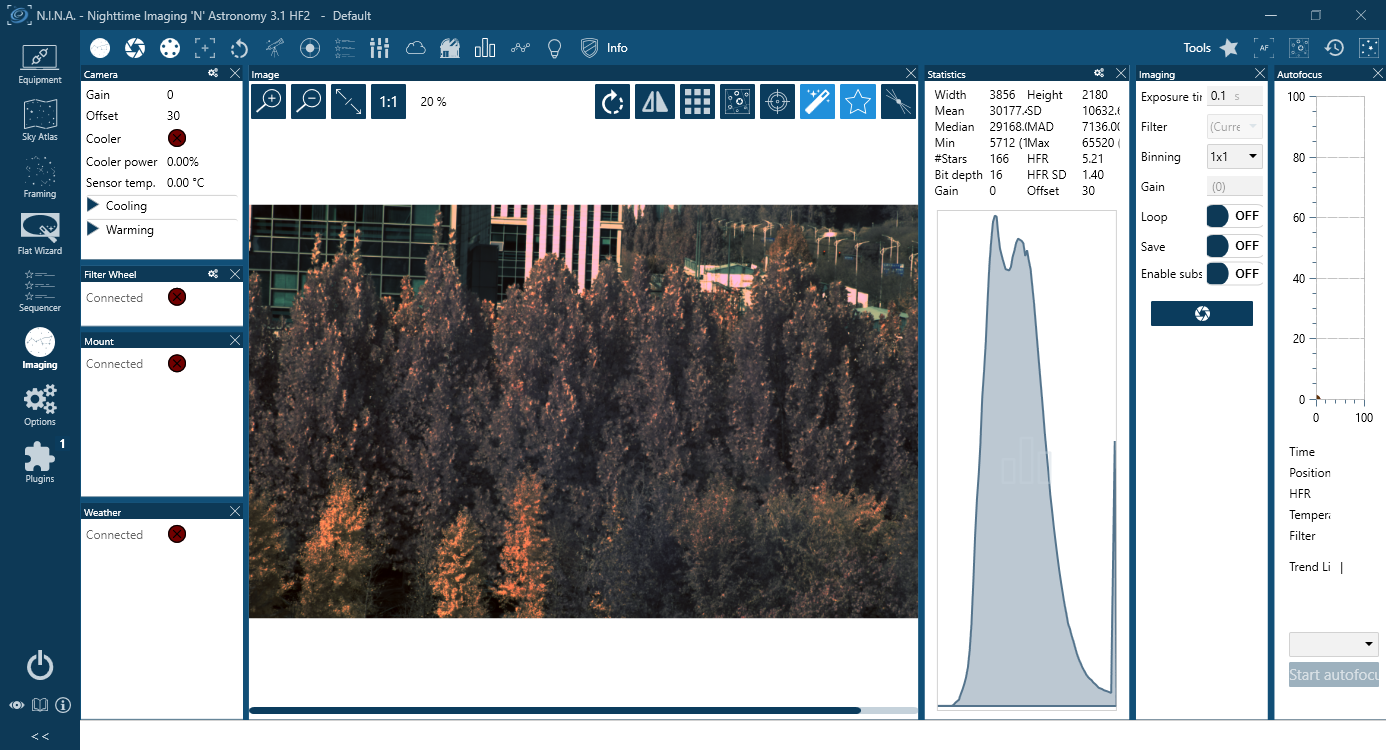
Set exposure time and start the shooting.
Connect Planetary Imaging Software (e.g. SharpCap)
The instructions below are based on SharpCap 3.1
- Launch SharpCap.
Click Camera in the menu bar and select your camera.
If the software and drivers mentioned above have been installed correctly, the image will appear automatically. And the frame rate can also be seen in the lower-left corner of the software window, as shown below.

- Main Interface Functions:
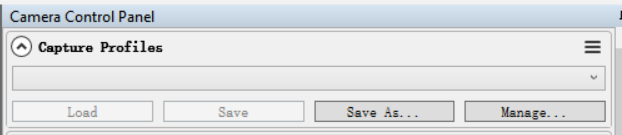
Capture Profiles
Preset management.
After SharpCap is restarted, the default settings are restored. If you frequently use one or more specific parameter configurations, you can adjust the parameters as needed and then click Save to store them as a preset. The preset can be directly recalled the next time you open the software.
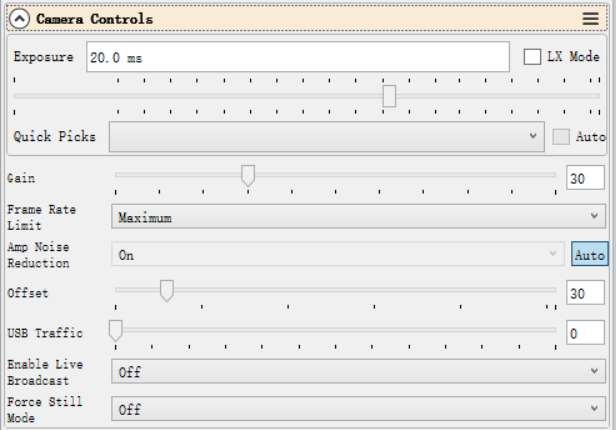
Exposure
Sets the exposure duration. When LX Mode is enabled, the single-frame exposure time can be extended to longer values.
Gain
Equivalent to the ISO setting on a standard digital camera. Higher gain values result in higher sensitivity.
Frame Rate Limit
Limits the maximum frame rate. By default, no limit is applied. Users can set the limit manually if needed.
Offset
Adjusts the bias level. Even when the camera is completely covered, the image may not appear perfectly black. By adjusting the offset value, a more optimal dark frame can be achieved. The Histogram can be used to verify the adjustment.
USB Traffic
Controls the data transfer speed (frame rate). When set to 0, the camera operates at its maximum frame rate.
Enable Broadcast Mode
Enables the broadcast driver. For detailed usage instructions, please refer to the documentation available on the download page.
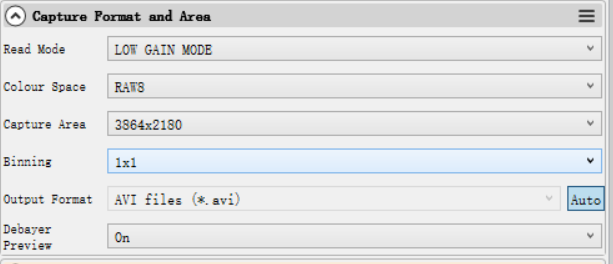
Read Mode
Some camera models support high-gain and low-gain readout modes.
Color Space
Select the output format.
Raw8 / Raw16 are 8-bit or 16-bit formats. Images and videos saved in Raw8 or Raw16 format will be monochrome, even when using a color sensor. Color information must be restored through debayering during post-processing.
RGB24 is a non-RAW format that outputs color images directly, but requires more storage space.
Capture Area
Select the resolution used for image capture.
Binning
Enable pixel binning for image capture.
Output Format
Select the output file format.
Debayer Preview
When this function is enabled, the live preview will be displayed in color even if a RAW format is selected. Please note that the saved images will still be monochrome.
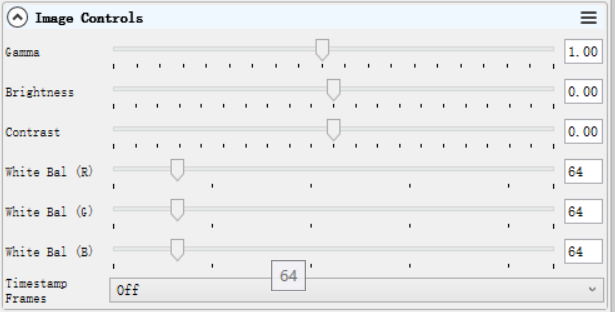
Gamma, Brightness, Contrast
Under normal operating conditions, we recommend leaving these settings unchanged.
White Balance (R/G/B)
This function is used for white balance calibration on color cameras. For detailed calibration instructions, please refer to the corresponding section on the color camera page.
This function is not required for monochrome cameras.
Histogram
The histogram is an important image reference tool. It can be used to check whether the white balance is set correctly, whether the offset value is appropriate, and whether the image is overexposed.
Its operating principle is the same as that of the histogram used in standard DSLR cameras.

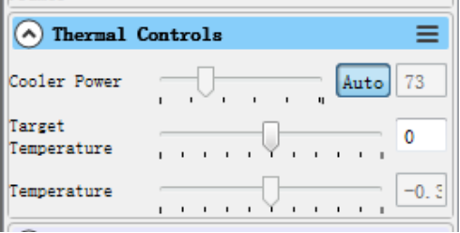
Thermal Controls
After the cooled camera is connected to a 12 V power supply, the temperature control circuit will be activated. You can control the CMOS sensor temperature by adjusting the settings shown below.
There are two main methods for temperature control:
Adjusting the cooler power
Setting a target temperature
If you wish to control the CMOS temperature by setting a target temperature, first click “Auto”, and then use the slider to set the desired target temperature.
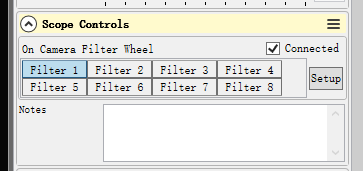
Scope Control: for filter wheel control
Select the corresponding filter wheel slot to control the rotation.
Note: The software must be started after the filter wheel has completed its rotation and returned to the home position; otherwise, the position will not be displayed correctly.
Using Ascom
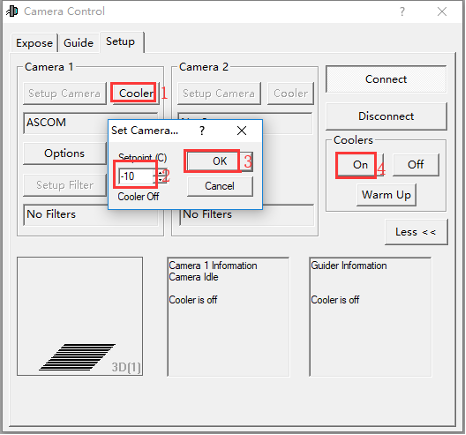
QHY devices can operate with many software applications that support the ASCOM platform. MAXIM DL is used as an example below.
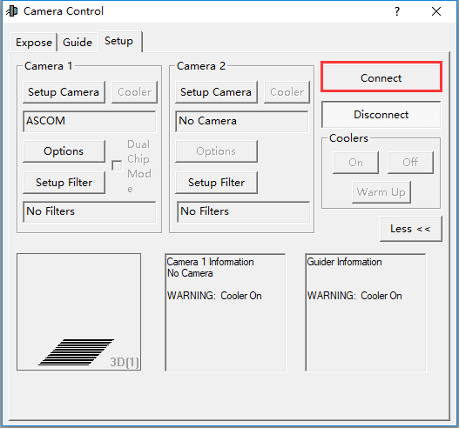
First, make sure that both the ASCOM platform and the QHY ASCOM driver have been successfully installed. Launch MAXIM DL and follow the instructions shown in the figure below to complete the setup.
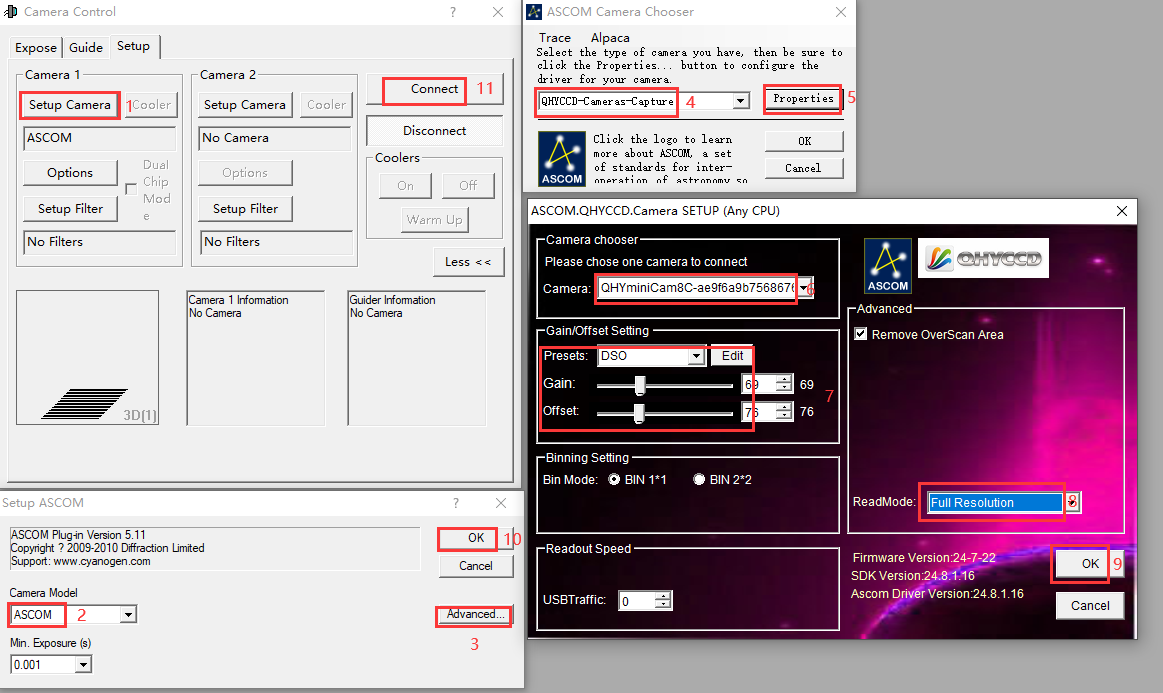
Click “Connect”
Set the cooling temperature.
Using EZCAP
EZCAP_QT is software developed by QHYCCD. For QHYCCD cameras, it provides basic image capture functions.
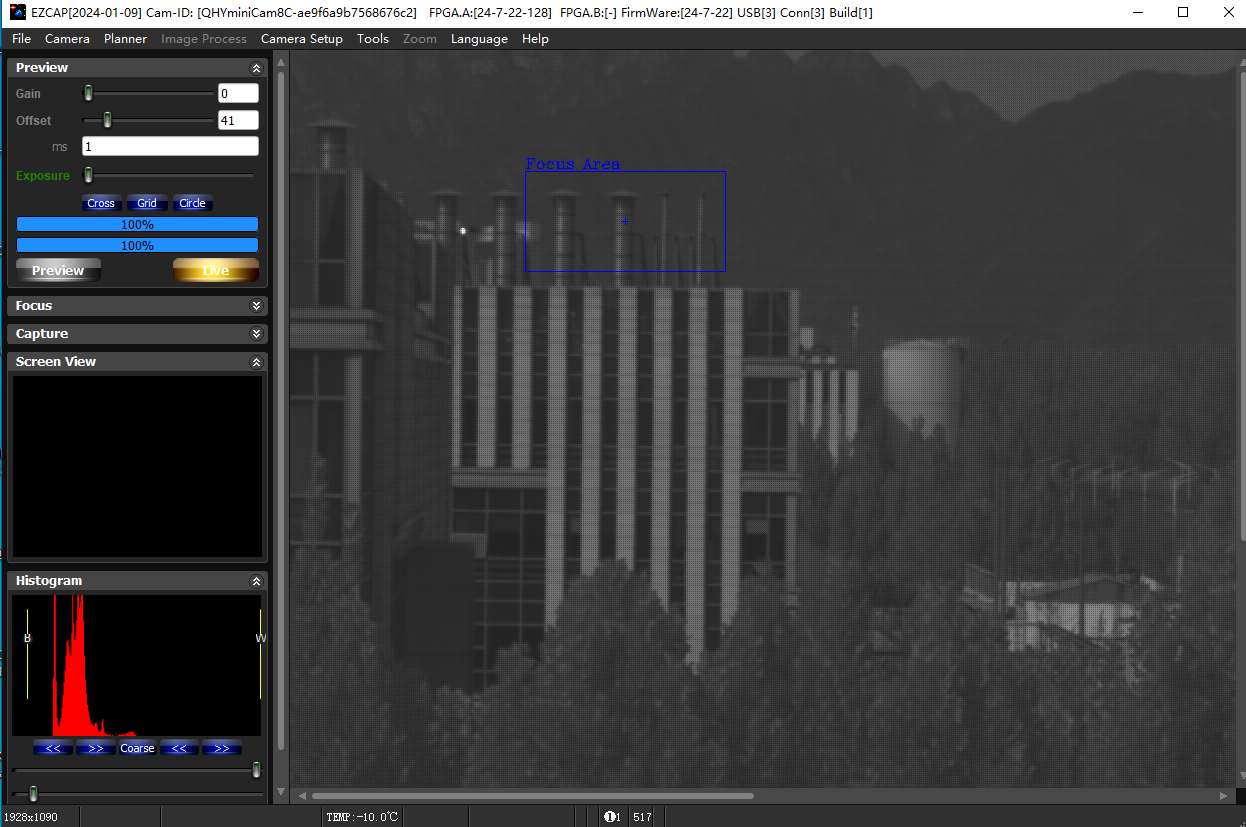
Install the EZCAP_QT software and connect the camera to your computer using a USB 3.0 cable. Launch EZCAP_QT, then click “Connect” under Menu → Camera.
If the camera is successfully connected, the EZCAP_QT title bar will display the camera firmware version and camera ID, as shown in the figure below.

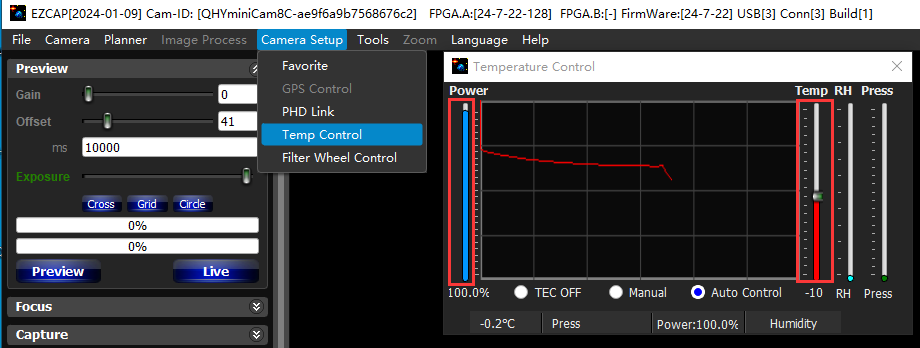
In Camera Setup, click Temp Control to set the CMOS sensor temperature.
You can enable Auto to define a target temperature. For example, here we set the target temperature to –10 °C. The CMOS sensor temperature will quickly drop to the target value, typically within 2–3 minutes.
To disable cooling, select Stop. If you prefer to control the cooling power without setting a target temperature, you can manually set the cooling power as a percentage.
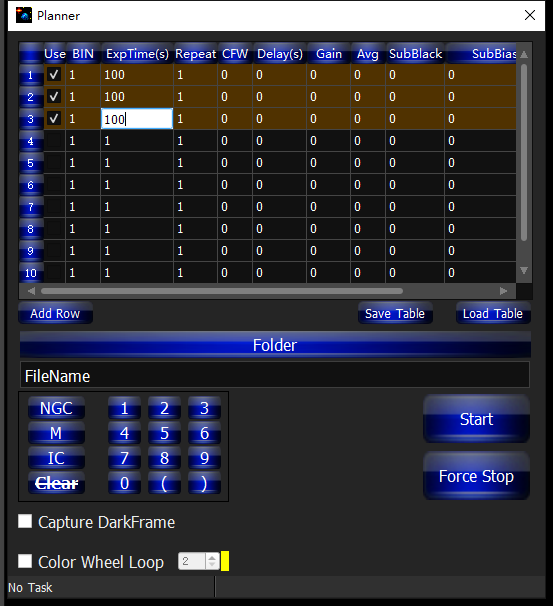
In EZCAP_QT, there is an Image Task Planner for sequence imaging.
Check Use to enable the task.
Set the following parameters:
Bin
ExpTime – exposure time
Repeat – number of frames
CFW – filter wheel position
Gain – gain value for the sequence
Click Folder to set the save path. (It is recommended to avoid special characters in the path and use English letters.)
Click Start to begin the sequence capture, and Force Stop to close the current task.
FAQs
Technical Support
You can login QHYCCD Help Center for any technical support.
Submit a Ticket: Describe the issue you met while you’re using them. Our technicans will reply you in 48 hours during working days. You don’t have to check the Ticket update everyday—they can receive email notifications and know if there’s any update.
Knowledge Base: Here lists some tips for using your gears, or solutions to issues that you may met. Help your self!
Support History: Check your ticket’s status.
Other Links
Instructions for adapter system:
https://www.qhyccd.com/astronomical-camera-adapter-bfl-solution/
Driver download:
https://www.qhyccd.com/download/
Maintenance
Appendix: How to set Gain and Offset
Unity Gain of Some Models
| Unity Gain | |
| 600M/C | 25 (Extended Full Well Mode) * |
| 268M/C | 30 (Extended Full Well Mode) * |
| 294Pro | 1600 (11MP Mode)
2600 (47MP Mode) |
| 410C | 90 (Low gain)
40 (High gain) |
| 367C | 2800 |
| 247C | 2200 |
| 128C | 3300 |
| 168C | 10 |
| 183M/C | 10 |
| 163M/C | 120 |
| 174GPS | 17 |
| 550P | 85 |
Gain Setting
For beginner, we recommend that you set the gain to “unit-gain”. Unit-gain is the gain when system gain is 1 (1e/ADU). This number is shown in the table above, like the unit-gain of QHY168C is 10. In fact, increasing or decreasing a bit doesn’t make a big difference.
You could increase or decrease Gain according to the condition. For example, if your optical system is fast, like F2.2 to F5, or long exposure for more than 5 minutes without narrowband filters, then you can decrease GAIN to achieve a higher dynamic range and make better use of full well capacity. By doing so you can avoid overexposure.
If you use narrowband filter on a slow optical system like F6 to F10, or short exposure time, the amount of photons received will be less. In this case you can increase GAIN to make better use of characteristics of low read-out noise in high GAIN value.
OFFSET Setting
There is no fixed “best value” for OFFSET. To set OFFSET, you should take the bias frame and dark frame at a certain GAIN value, then check the histogram of the frames.
The histogram distribution is a peak-like curve. While changing the OFFSET value, the histogram will move left or right. We need to guarantee the range of the whole curve won’t be chopped off at the end. At the same time, we need to keep a little residue on the left side, just over 0 a bit.
Pay attention that under different GAIN values, the width of this peak varies. The higher the GAIN is, the wider the distribution will be. So OFFSET value at low GAIN is not suitable for high GAIN because the curve is easily to be chopped off.
Advanced Settings
For those CMOS less than native 16-bits, the AD sampling accuracy doesn’t match perfectly with the full well capacity. At low GAIN level, the system gain will be couple electrons per ADU. The camera loses the ability to distinguish the strength of the signal because of such sampling error.
When GAIN increases, the system gain will decrease. However, increasing GAIN will limit the full charge of the well. If the system gain is 1 for a 12bit CMOS camera, the pixel will be saturated at only 4096 electrons (full well). Some bright stars will be easily saturated. This problem goes worse under fast optical system or long exposure. Over saturated objects cannot be fixed during post processing (unless you shrink stars, like in PixInsight). Also, the color saturation of the star will be affected. As result, the stars will be huge and white washed. We should decrease the gain value in this case, to gain a higher full well capacity.
Under long exposure or using fast optical system, the pixel will receive more photons. The variation of quantized noise from the photon which you can consider as natural dithering of the light intensity, will be greater than the “noise” from the sampling error. Therefore, the effect of the sampling error will diminish. By averaging multiple exposures, this will compensate the lack of depth of the picture because of the sampling error.
If the number of received photons is limited, like using narrowband filters or short exposures, we can increase the GAIN value. It is because the stars will not be easily saturated. At the same time, we limit the noise from the background cosmic radiation. Under this condition, the readout noise and quantized noise are the major factors that affect the ability to distinguish dim light or objects. By increasing the GAIN value in order to decrease the readout noise and quantized noise from sampling error, this would greatly increase the signal to noise ratio.
